FS++飞控使用教程
FS++ 飞控概述
FS++ 飞控是可以针对不同的用户需求,进行功能定制的多旋翼控制系统。
通过软件操作可进行日志回放,日志为飞行过程中记录的所有的数据信息。这些数据信息可用于分析还原当时飞行器的状态,操作指令等。
在飞行过程中若出现异常状态,飞控会触发保护模式,针对不同级别的异常状态,会使飞行器分别进入悬停、返航降落、原地降落、电机锁定的保护模式。
● 本产品适用于多种自动控制领域的功能应用,当前主要应用于多旋翼的植保作业,以及多旋翼的航测作业;
● 适用于起飞重量 100KG 以下的多旋翼飞行器;
● 支持 GPS 定位以及北斗卫星定位,支持 RTK 定位以及双天线定向;
● 植保作业中具备:随途调整喷洒量,自动断点续航,无药自返航,仿地避障,不规则地块航线规划,AB 点航线飞行等专业应用功能;
● 航测作业中具备:云台实时控制,相机或数据链可实时控制,航线断点续拼,航线拍照激活点的信息记录等;
● CAAC 培训中具备:配合专用地面站操作一键起飞,航线规划与飞行,随点随行,原地降落与返航降落,虚拟手柄(或舵盘操作)
FS++ 飞控硬件参数
主控模块特性
Processors & Sensors 处理器和传感器
FMU处理器:STM32H743
32 Bit Arm® Cortex®-M7, 480MHz, 2MB memory, 1MB SRAM
IO处理器:STM32F103
32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
On-board sensors 板载传感器
Accel/陀螺:ICM-42688-P
Accel/陀螺:BMI055
Mag磁罗盘:IST8310
气压计:MS5611
Electrical data 电子数据
电压的等级:
最大的输入电压:6伏
USB功率输入:4.75~5.25V
伺服轨道的输入:0~36
Current Ratings: 目前的等级:
Telem1最大输出电流限制器:1A
所有其他口的合并输出电流限制器:1A
Mechanical data 机械数据
尺寸(模型):53.3 * 39 * 16.2 mm
重量(模型):39.2克
Interfaces 接口
14-舵机的产出(8IO,6FMU)有硬件可切换的3.3V和5V信号的模式
2个一般串口
Telem1-完整的流程控制、独立的1.5当前限制
Telem2-完整的流程控制
Telem3-完整的流程控制、I2C、BUZ
GPS1-基本GPS口
1个I2C口
支持专门I2C校准EEPROM位于传感器模块
2个CAN口
FMU Debug
专用RC IN输入Spectrum/DSM and SBUS,CPPM、模拟/PWM RSSI
1个功率输入口(模拟)
Other Characteristics 其他的特征
操作温度:-40-85°c
电源模块 1
型号 2*12S 电源模块
电源模块端口及标记说明
- INPUT 输入电压范围为 8.4V 至 50.4V,仅适用于锂聚合物电池
- OUTPUT 此端口接入飞控的 POWER 端口,输出: 5V/3A
电源模块 2
型号 4*18S 电源模块
电源模块端口及标记说明
- INPUT 支持 4S 至 18S 的电源输入(最大 80V),一级瞬时过载可达 33A,二级耐压 60V,二级降压双重保护。一级输入不高于 60V 时,即使一级失效,二级也能正常运行保证二级终端设备正常工作。
- OUT1/OUT2 XT30 接口,输出: 12.3V/10A
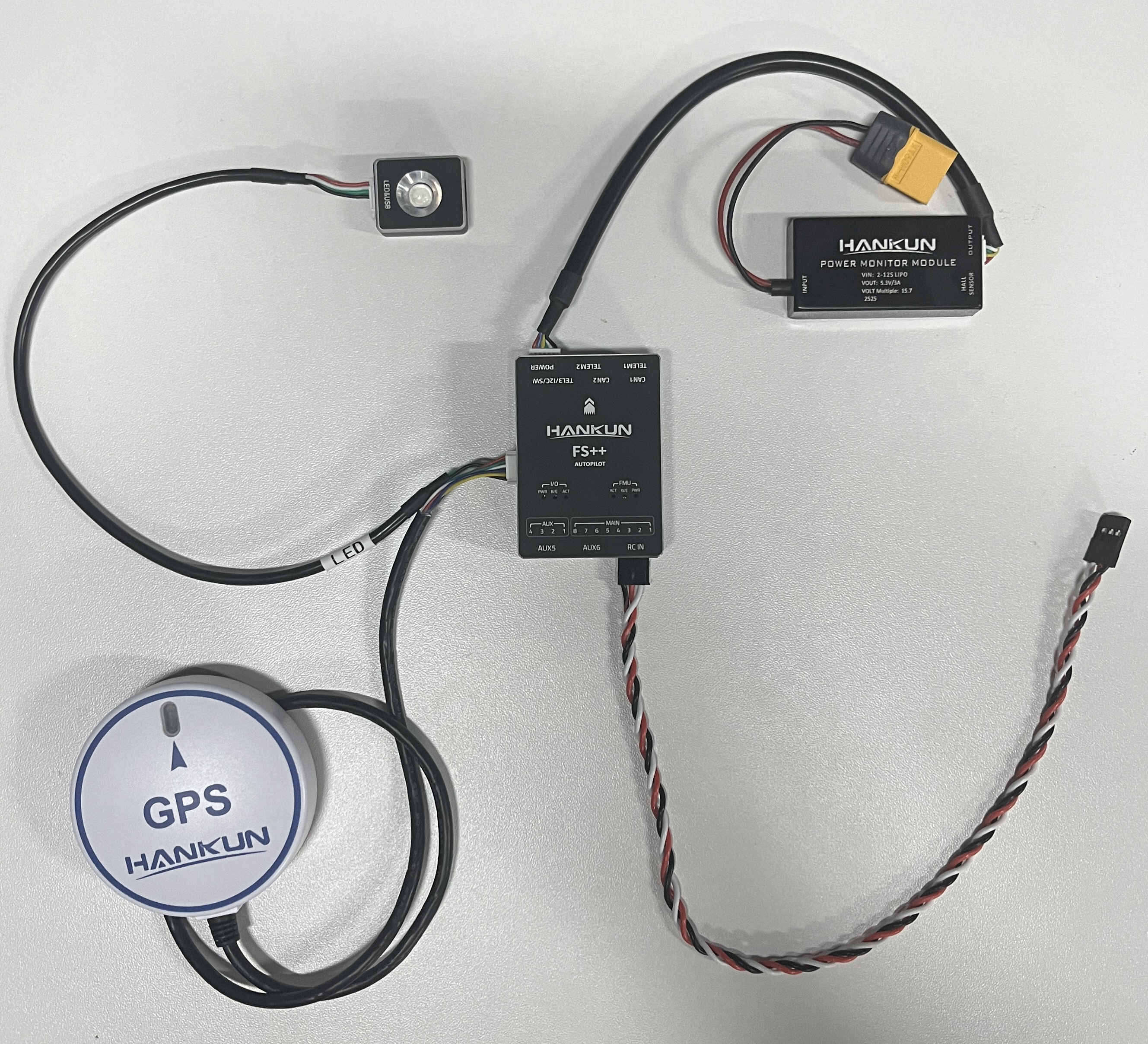
FS++ 飞控接线图
接口详情
BEC 模块 或 电源模块:接 Power1 接口
GPS 模块:接 GPS1 接口
数传:接 TELEM1 接口
接收机:接 SBUS RC IN 接口
USB 数据传输线:接侧边的 Type-C 接口
LED 灯(LED 线):接 I2C 接口
电机电调通信信号模块:接 M1-M8 PWM OUT 接口
接线图示 1
下图为FS++飞控配件的接线方式,其中RC IN接口的杜邦线是连接接收机的SBUS接口,MAIN1~8通道则是接电调信号线(信号线朝上地线朝下接入)。若配有siyi接收机或独立数传,则数传功能的接线接入TELEM1接口。
FS++ 飞控安装
主控模块安装
主控模块为 FS++ 飞控系统的核心部分,负责处理各模块发送的信息,以及飞行控制的运算与信号输出。
安装主控模块时,需注意以下内容: 1.首先确认飞行器的机头方向,飞控方向与机头方向必须保持平行并且方向相同; 2.必须安装在飞行器内部,并且在飞行器的中心位置或靠近中心的位置进行安装; 3.飞控装的位置须结构稳定,与动力平面保持水平; 4.飞控需使用专用的 3M 胶粘贴,粘在飞控的四个边角,粘住后水平不能有一边翘起; 5.飞控安装一般无需使用减振板,视实际情况进行安装。
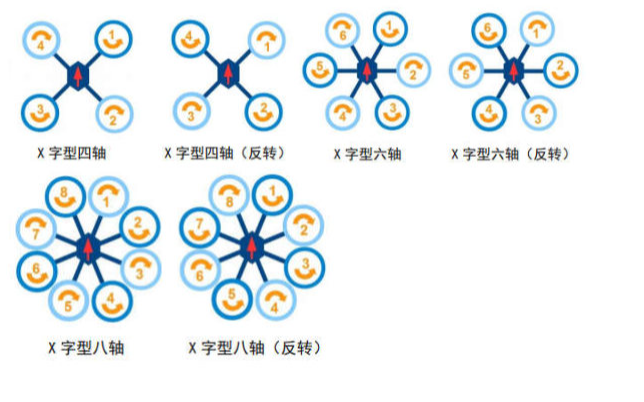
● 关于电调与飞控的接线,F 系列飞控的 M1 电调序号如下图所示:以俯视的角度且机头朝上,左上角第一个电机开始顺时针,不是逆时针。(机架中电机标注的编号可能会不一致,此时请以本说明为准)
● 在地面站的马达测试步骤中,操作人员可以确认电调与飞控的接线顺序是否正确。
下方为主模块安装确认接线是否正确图示
GPS 模块安装
1.外置的 GPS 模块中含有磁罗盘模块,用于给飞控提供定向信息,因此 GPS 模块的安装方向应具有严格要求,若安装方向不正确,会导致飞行器起飞后不受控制的偏离(马桶效应)。GPS 还会提供定位信息,因此 GPS 需要安装并且不易移动。确保信号采集,减少反射信号导致的干扰。
安装 GPS 模块时,需注意以下内容:
2.GPS 的箭头方向需与飞控的箭头方向一致,安装时可使用手机的指南针或其他设备,确认箭头的指向一致,误差需要控制在 3° 以内; 3.请勿把 GPS 直接安装在机身上或飞行器内部,必须使用 GPS 柱,使 GPS 的安装位置高于机身;
安装位置必须远离电电源线,GPS 连接飞控的信号线也需要远离电源线。
数传模块以及遥控器接收机安装
1.数传模块为用于飞行器与地面站的通信信连接,遥控器接收机为用于飞行器与遥控器的通信连接。若安装方式不正确,会导致通信信连接丢失。
安装通信连接模块时,需注意以下内容: 2.接收机与数传安装时要把天线至于飞行器外侧,尽量远离机身减少遮挡,天线不可紧贴金属物、碳板等导电物体; 3.接收机的两根天线最好是相互垂直或相互远离,便于信号接收。
FS++ 飞控连接地面站
飞控与地面站的连接方式:
1.飞控或数传的 USB 接口进行的有线连接
2.蓝牙配对进行的无线连接
有线连接
连接前准备
1.USB 连接:将 USB 一端接上飞控,另一端接上电脑
使用 type-c 数据线的,接飞控侧边的 Type-c 口,使用 Mirco-usb 数据线的,接 LED 灯上的 usb 口
2.915 数传连接:将飞行器用电池供电,确保飞控开机,另一支 915 数传使用 USB 接上电脑端
此时查看飞行器上的 915 数传的灯是否是常亮且接线是否正确
若灯是闪烁的,证明没有对频,需要将数传重新对频
若飞机端的数传接线口不是 TELEM1,请接到正确的接口
下载驱动
下载官网
请下载名为:飞控驱动和数传驱动的内容并安装
无线连接
连接前准备
1.将遥控器主控打开,分辨是否是主控的方法为:主控后边贴有飞控编号的贴纸 飞行器上电后,拨动模式杆,飞行器的LED灯会有颜色变化
2.飞行器上电,查看接收机上的灯是否为绿灯常亮,若是红灯闪烁则没有对频,需要先对频,另外检查接收机上是否接好了一根彩色的线材,另一端接到飞控的TELEM1口
3.打开电脑的蓝牙,搜索SIYI开头的蓝牙并连接,配对码为1234,有时候连不上,重启一下遥控器
关于有线连接和无线连接中,确认正确的串口号的小妙招
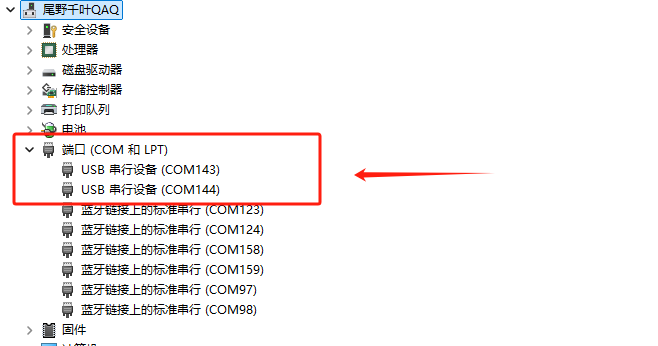
有线连接
打开电脑的设备管理器
选择串口列表
USB直连飞控的情况下,会显示“USB串行设备(comxxx)”这里的comxxx就是串口号,但是可能需要两个都尝试一下
下方为USB连接地面站确认端口号方法图示
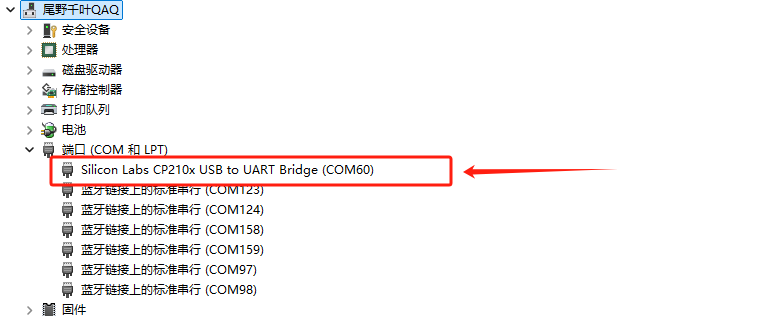
数传连接的时候,会显示“CP210XUSB to UART Bridge(comxxx)这里的comxxx就是串口号
下方为数传连接地面站确认端口号方法图示
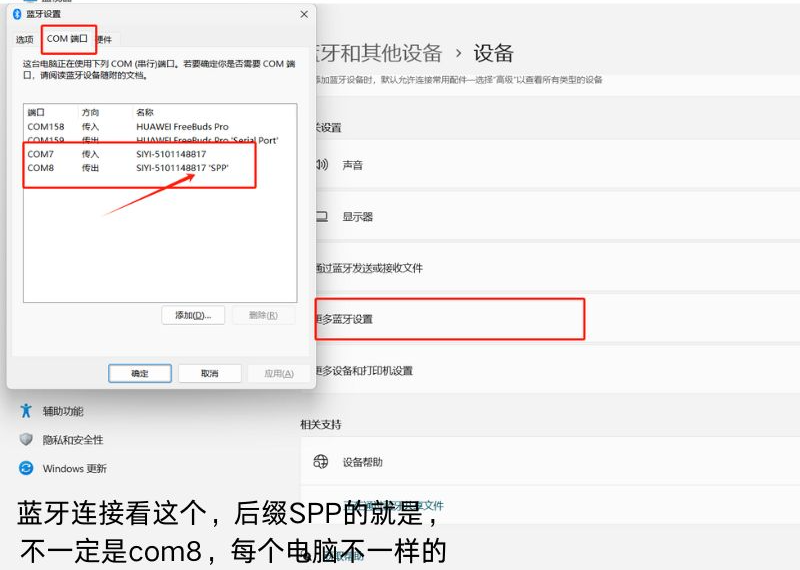
无线连接
连接上主控蓝牙之后,拖动到电脑蓝牙页面最下方,找到“更多蓝牙设置”
点进去后选择上方“com口”
会看到下方显示“comx 传出 SIYI-XXXXXXXX"SPP"”,注意有这个spp的就是正确的com口号
下方为蓝牙连接确认端口号图示
正式开始连接地面站
1.地面站点本地登陆,不要注册账号
2.保证地面站是最新版本,新老用户请移步至官方网址:下载官网
下载内容为:多旋翼超视距地面站-3D版本
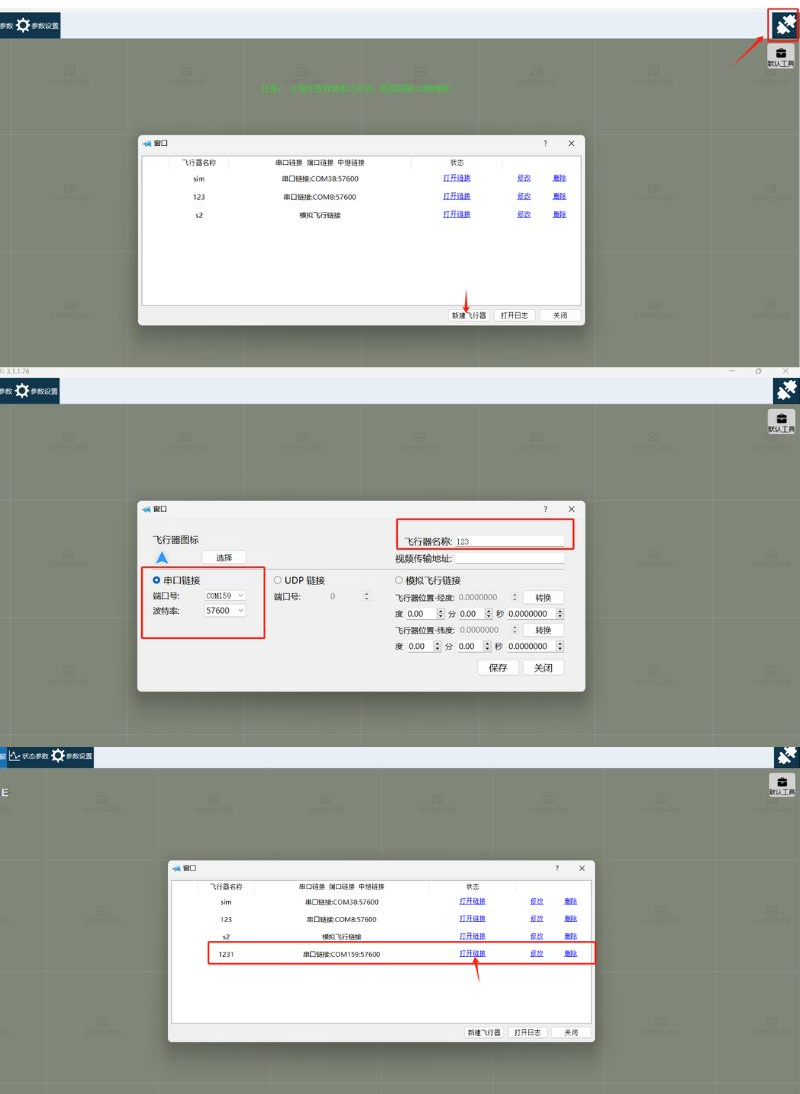
3.保证电脑处于联网状态,打开地面站后,点击右上角的连接按钮
4.新建飞行器连接,输入飞行器的名字,左侧选择串口连接
5.下拉com口的列表,选择通过小妙招获取的正确的com口号,波特率选择57600,保存
6。点击右侧,打开链接,喝口茶静静的等待读条
下方为连接地面站图示3
FS++飞控初次试飞前调试
无论是汉鲲的整机用户还是仅购买汉鲲飞控的自组装用户,均需认真学习以下操作
对于仅购买汉鲲飞控的用户,在飞控正确安装在飞行器上且飞行器组装完成后,需按顺序逐个完成下方步骤
对于汉鲲的整机用户来说,收到汉鲲整机之后,仅需完成“马达测试”和“磁罗盘校准”两个操作
参考地面站使用说明书,使飞控连接至地面站,请按下述步骤进行操作。
1.先做遥控器校准;
2.做电调行程校准(必须先完成步骤1);
3.做马达测试,主要目的是检查电调到飞控的接线顺序有无错误,电机接线顺序请参考说明书或者马达测试界面的图;
4.测量 GPS 与飞控的相对距离,进行 GPS 位置补偿的设置;
5.到场外进行磁罗盘校准;
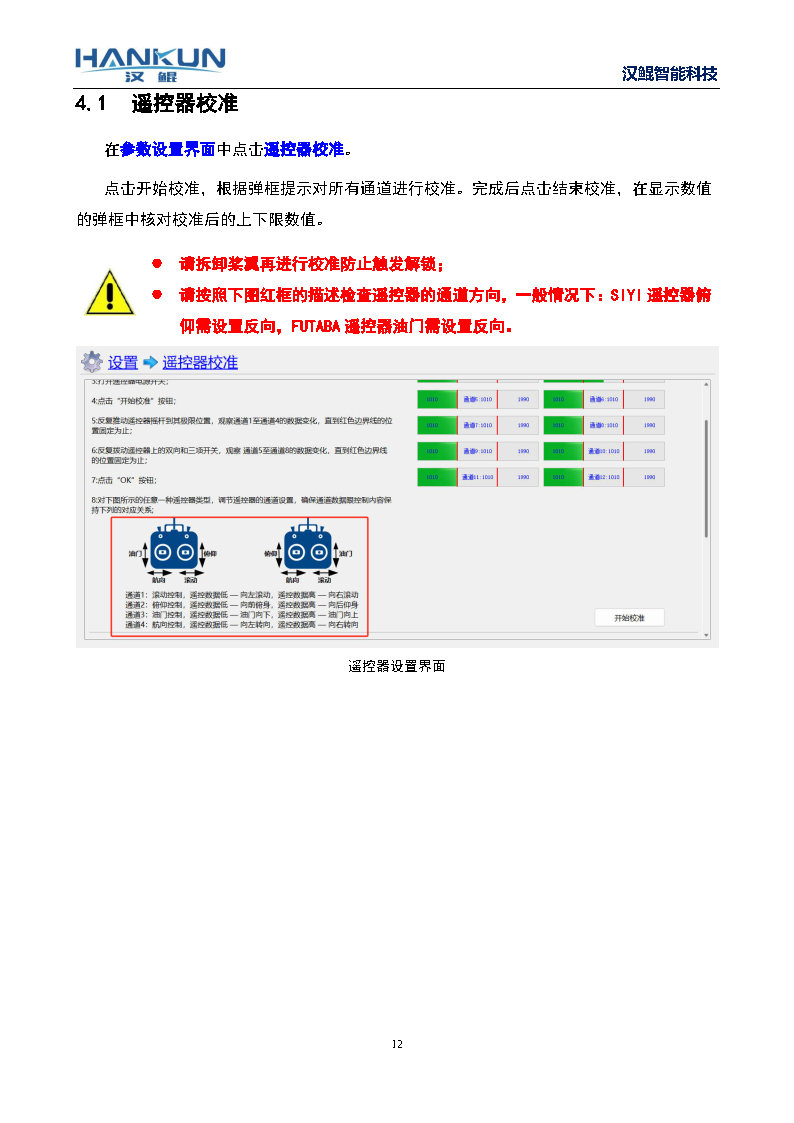
遥控器校准
在参数设置界面中点击遥控器校准。
1:确保遥控接收器与飞控模块正确连接并正常工作(右侧通道映射上有绿条且拨动杆时会跟随变动)
2.尽量不要安装螺旋桨(若在安装螺旋桨的情况下校准,注意不要触发解锁动作)
3.确保遥控器微调全部归零(地面站校准前最好先做一次摇杆校准)
4.点击“开始校准”按钮并确认弹窗
5.反复推动遥控器摇杆到其极限位置,观察通道1至通道4的数据变化,直到红色边界线的位置固定为处.(尽量拨到最大值和最小值,可能需要用点力气)
6.反复拨动遥控器上的双向和三项开关,观察 通道5至通道8的数据变化,直到红色边界线的位置固定为止;
7.确保所有杆在中位时,点击”校准结束“
8.对最终校准值进行确认,前四个通道保证最大最小值,中间值一致(误差必须在10以内)
9.再次拨杆,核对每个通道的正反向是否正确(遥控器校准页面下方有图示)若不正确,可在遥控器内部设置舵机反向
下方为遥控器校准图示
遥控器校准的教学视频链接:
[遥控器校准](【试飞前检查第一步-遥控器校准】 https://www.bilibili.com/video/BV191WEetETU/?share_source=copy_web&vd_source=3294eedac1cf618d2dbda88d67edf41b)
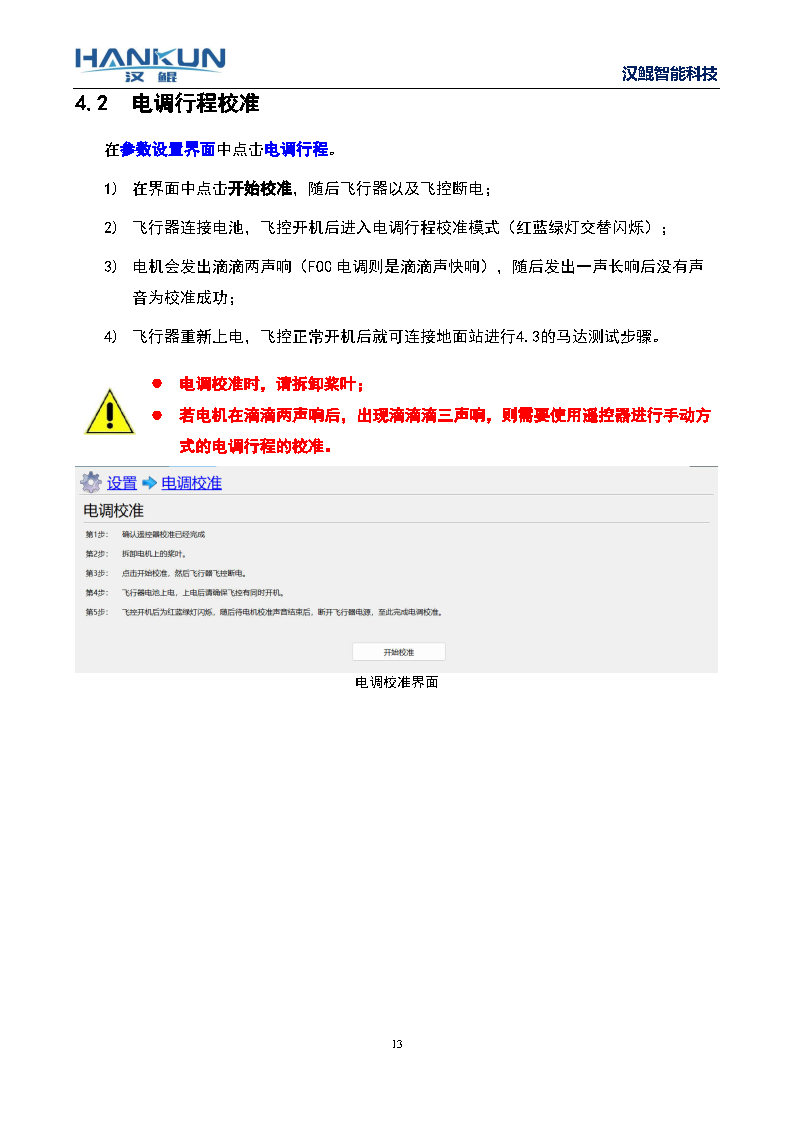
电调行程校准
1.确认遥控器校准已经完成
2.拆卸电机上的奖叶。
3.点击开始校准,然后飞行器飞控断电。
4.飞行器电池上电,上电后请确保飞控有同时开机,
5.飞控开机后为红蓝绿灯闪烁,随后待电机校准声音结束后,断开飞行器电源,至此完成电调校准。
下方为电调行程校准图示
电调行程校准的教学视频链接:
[电调行程校准](【试飞前检查第二步-电调行程校准】 https://www.bilibili.com/video/BV1eWWJeaE4j/?share_source=copy_web&vd_source=3294eedac1cf618d2dbda88d67edf41b)
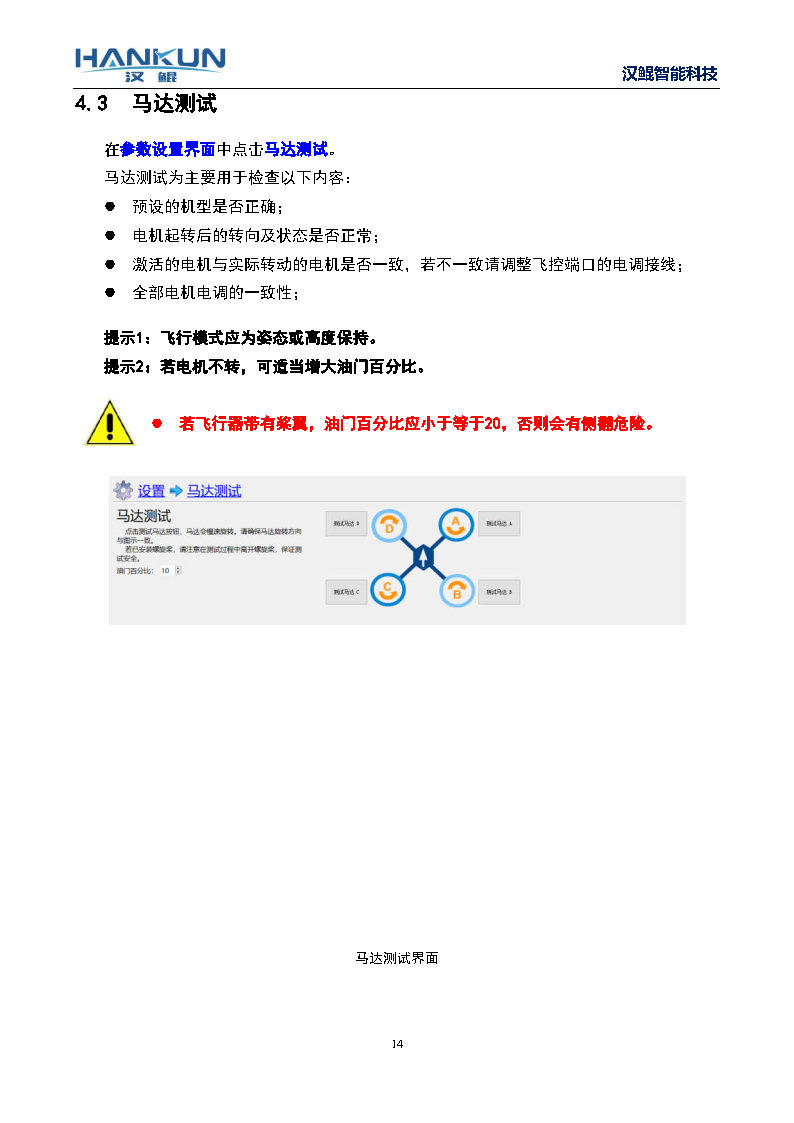
马达测试(电机测试)
1.确认所有的电机都有信号(上电没有滴滴响声)
2.飞行器切换至姿态模式,逐个测试电机转向以及位置,与左侧图示比较看是否一致
若均一致,则说明电机安装无误,若位置不一致,则检查是否电机电调线接错,若电机转向不一致,则调整电机与电调直接的香蕉头,任意对换一个或是查看是否是电机臂位置安装错误
3.需要注意的是若是新鲜安装飞控的飞机,最好是做两次电机测试,第一次在上桨之前,确认电机是否正常工作,转向位置是否正确,第二次是上桨后,确认桨叶转向是否与电机一致
下方为马达测试(电机测试)图示
马达(电机)测试的教学视频链接:
[马达(电机)测试](【试飞前检查第三步-马达测试】 https://www.bilibili.com/video/BV1LpWJeAEMF/?share_source=copy_web&vd_source=3294eedac1cf618d2dbda88d67edf41b)
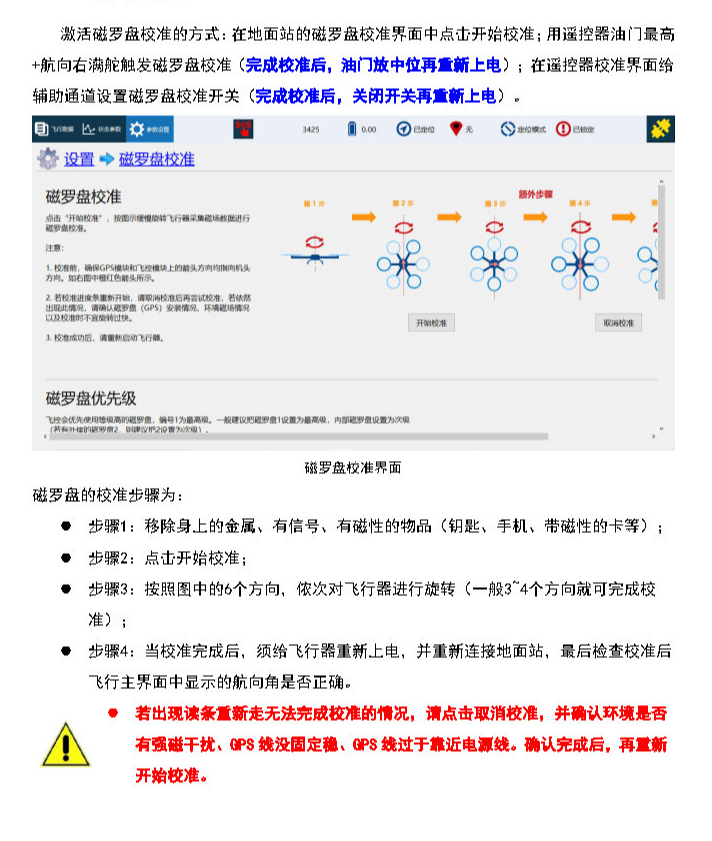
磁罗盘校准
首先先连上地面站,用数传或者蓝牙,不用USB,其次必须在室外校准
飞行器在室外上电,等待自检通过,放下身上的金属物品,包括手机
点击“开始校准”,按图示缓慢旋转飞行器采集磁场数据进行磁罗盘校准。
注意:
1.校准前,确保GPS模块和飞控模块上的箭头方向均指向机头方向。如右图中橙红色箭头所示。
2.若校准进度条重新开始,请取消校准后再尝试校准,若依然出现此情况,请确认磁罗盘(GPS)安装情况、环境磁场情况以及校准时不宜旋转过快。
3.校准成功后,请重新启动飞行器。
下方为磁罗盘校准图示
磁罗盘校准的教学视频链接:
[磁罗盘校准](【试飞前检查第四步-磁罗盘校准】 https://www.bilibili.com/video/BV1nD4y157HQ/?share_source=copy_web&vd_source=3294eedac1cf618d2dbda88d67edf41b)
磁干扰校准
注意:磁干扰校准一般都不需要使用,使用时请查看此说明。磁干扰校准使用方法以及注意事项
FE飞控机型设置
当前面步骤均完成后,理论上已经可以进行试飞,原因是飞控一般出厂前就针对客户的机型进行了参数预设,但如果有更换机型的需求,需要重新选择对应机型
连上地面站后,在地面站的参数设置-机型设置中选择更换,选择后要进行保存
在界面选择实际的飞行器所对应的机型然后点击保存,要注意机架类型上标的电机转向和位置,与实际的是否一致
下方为机型设置图示(机架类型设置)

FS++飞控用户调参设置
连接地面站后,进入参数设置界面-PID调参界面
PID调参界面有各项涉及飞行器控制的参数,一般飞行器出厂之前已经预设好了对应机型的参数,所以不需要用户自行调整
若用户有多旋翼的PID调试经验,可以尝试自己动手调试。
若用户没有多旋翼的PID调试经验,出于安全考虑,建议用户与我们的工程师联系,工程师会指导进行调参。
下方为用户调参界面图示

这里也有简单的教程,有兴趣的朋友可以学习一下:
调参教程:[基础调参教程](file:///D:/work/2024HanKun/Station/oversee/2024-6-24-Aopa/2024-6-24-Aopa/files/help/PID/train.html)
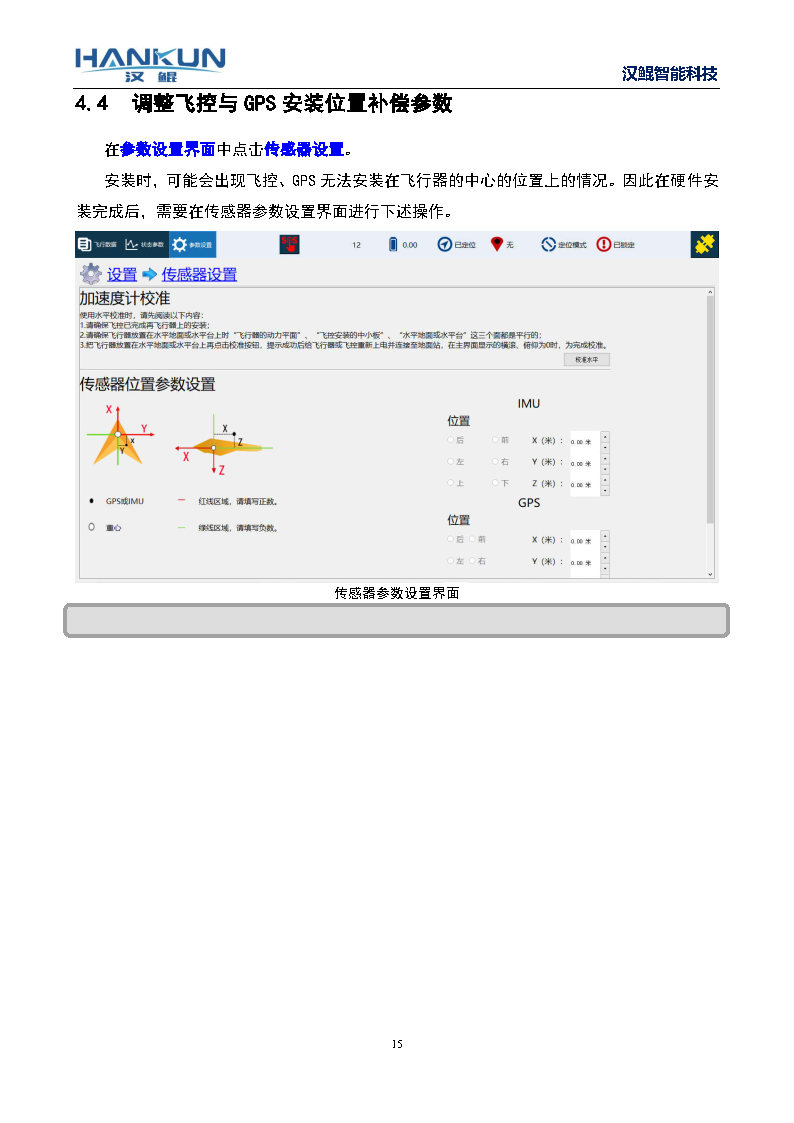
FS++飞控传感器参数设置
飞控的传感器设置共分为三个部分,并非初次起飞前必须要调试的选项,而是根据用户手上飞行器的机架和飞行状态不同进行的调整
水平面的校准功能
当飞行器飞行时姿态模式下有倾斜,可以尝试使用该功能
1.请确保飞控已完成再飞行器上的安装;
2.请确保飞行器放置在水平地面或水平台上时“飞行器的动力平面”、“飞控安装的中小板”、“水平地面或水平台”这三个面都是平行的;3.把飞行器放置在水平地面或水平台上再点击校准按钮,提示成功后给飞行器或飞控重新上电并连接至地面站,在主界面显示的横滚、俯仰为0时,为完成校准
传感器位置参数的设置
当飞控安装位置以及GPS安装位置相距飞行器中心位置较远时,可以设置
通常飞控安装位置以及GPS安装位置没有进行设置的情况下,会出现以下情况
1.飞行器打杆后晃动较大,难以控制
2.飞行器自旋时,自旋中心是GPS的中心而不是飞行器中心位置
以上情况,均可以通过设置传感器位置进行优化
设置的时候要注意单位和正负
下方为传感器设置图示
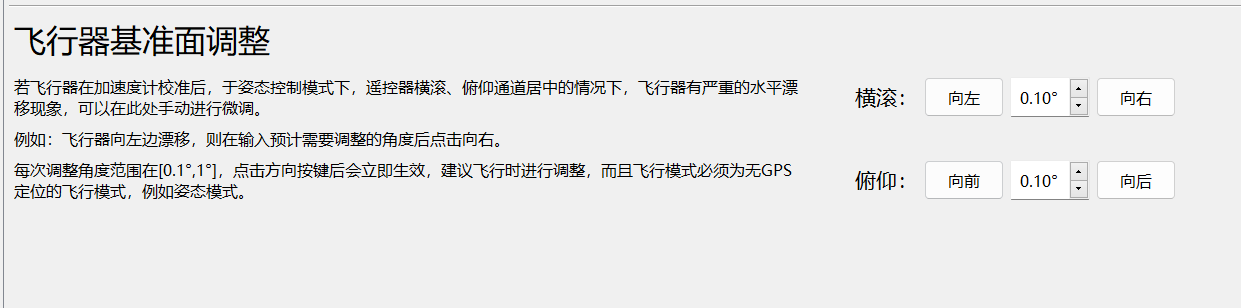
飞行器基准面调整(姿态模式偏移调整方法)
若飞行器在加速度计校准后,于姿态控制模式下,遥控器横滚、俯仰通道居中的情况下,飞行器有严重的水平漂移现象,可以在此处手动进行微调。
例如:飞行器向左边漂移,则在输入预计需要调整的角度后点击向右。每次调整角度范围在[0.11”,点击方向按键后会立即生效,建议飞行时进行调整,而日飞行模式必须为无GPS定位的飞行模式,例如姿态模式。
调整的具体方法
1.尽可能选择开阔的场地,GPS定位良好,尽量选择无风的环境
2.将飞行器起飞至一个安全位置,前后左右均无建筑物阻挡,切换至GPS模式,等待悬停稳定
3.遥控器杆位不动,仅切换模式至姿态模式,观察飞行器的偏移情况
4.往飞行器的偏移方向的反方向调整角度,比如飞行器往左后方偏移,则向右前方调整角度,偏移量较大的情况下,可以适当增大单次调整的角度,默认为0.1°/次,可以增加至0.5°/次
5.反复进行调整,直到飞行器的偏移速度变慢或者偏移量明显减小
6.该功能无法将飞行器的姿态模式调整至完全不动的状态,只能尽可能优化
下方为基准面设置姿态调整图示
FS++用户参数设置
用户在起飞前,可以根据自己的偏好去设置这些参数的内容,非必须设置,可以保持默认即可
连接上地面站后,点击参数设置-参数设置
该功能中包括了返航高度设置,低电压设置,地面站通信(失效)保护设置,还有悬飞状态下的飞行器最大飞行速度设置
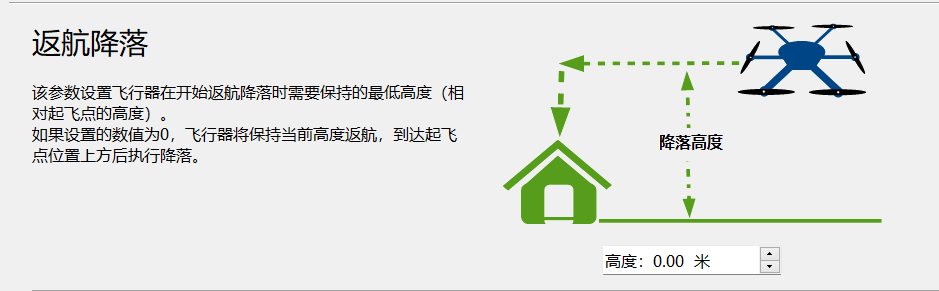
返航高度设置
该参数设置飞行器在开始返航降落时需要保持的最低高度(相对起飞点的高度)
如果设置的数值为0,飞行器将保持当前高度返航,到达起飞点位置上方后执行降落
一般默认为0,也就是以当前高度进行返航,若非要设置一个高度,建议是以当前飞行高度以上进行返航降落
下方为返航高度设置图示
电池安全
该参数设置飞行器的低电压数值,最低是多少伏会报警,用户可以自行设置(一般以3.6V单片为低电压保护阈值)
保护模式默认禁用,禁用的情况下,是仅有黄灯闪烁提醒,无声音
设置为原地降落或返航降落时,除了黄灯提醒之外,还会执行对应的动作,要注意执行动作的时候飞行器不可控,需要切换到姿态模式才可控,因此不建议设置为原地降落或返航降落
下方为低电压设置图示

地面站通信(失效)保护
该参数设置飞行器与地面站断开连接时,经过一定时间未恢复连接(默认5秒)执行的操作
默认为禁用,不执行任何动作
设置为原地降落或返航降落时,会执行对应的动作,要注意执行动作的时候飞行器不可控,需要切换到姿态模式才可控,因此不建议设置为原地降落或返航降落
下方为地面站失效保护设置图示

悬飞时最大速度
该参数设置悬飞时最大的飞行速度
下方为悬飞最大速度设置图示
FS++飞控飞行时注意事项
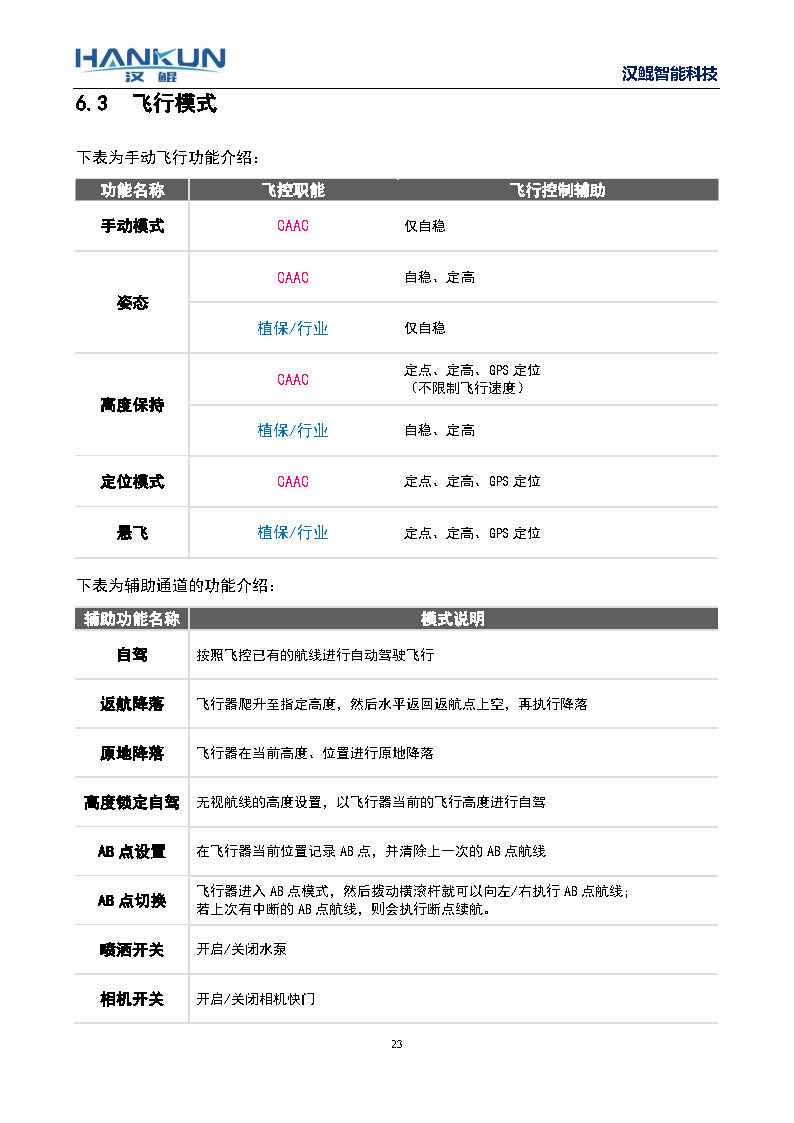
FS++飞控的飞行模式
主飞行模式,通过遥控器的模式切换杆切换
| 功能名称 | 飞控权限 | 飞行控制辅助 |
|---|---|---|
| 手动模式 | CAAC | 仅自稳 |
| 姿态模式 | CAAC | 自稳、定高 |
| 植保/行业 | 仅自稳 | |
| 高度保持 | CAAC | 定点、定高、GPS定位 |
| 植保/行业 | 自稳、定高 | |
| 定位模式 | CAAC | 定点、定高、GPS定位 |
| 植保/行业 | 定点、GPS定位 | |
| 悬飞模式 | CAAC | 定点、GPS定位 |
辅助通道功能:通过RC6-12通道设置拨杆触发
通用功能:
自驾:按照飞控已有的航线进行自动驾驶飞行
返航降落:飞行器爬升至指定高度,然后水平返回起航点上空,再执行降落
原地降落:飞行器在当前位置,位置进行原地降落
高度锁定自驾:无视航线的高度设置,以下飞行器当前的飞行高度进行自驾
快速调参通道:快速对飞行器进行PID调参
植保功能
AB点设定:飞行器当前位置记录AB点,并清除上一次的AB点航线
AB点切换:飞行器进入AB点模式后,然后移动横滚杆就可以在左/右切换AB点航线;若不按中断的AB点航线,则会执行原航线
喷洒开关:开启/关闭喷洒泵
行业应用功能
相机开关:开启/关闭相机快门
下方为功能图示
FS++飞控指示灯灯语
姿态模式:
| 飞行模式 | 对应灯颜色 | 对应灯语 |
|---|---|---|
| 姿态模式 | 紫红蓝交替闪烁 | 飞控已过初步自检,且GPS未定位 |
| 姿态模式 | 紫红(慢闪) | 飞控已过初步自检 |
| 姿态模式 | 紫红(快闪) | 飞控已完成自检 |
| 姿态模式 | 紫黄灯闪烁 | 有其它警报请连接地面站查看 |
高度保持 :
| 飞行模式 | 对应灯颜色 | 对应灯语 |
|---|---|---|
| 高度保持 | 白蓝交替 | 飞控已过初步自检,且GPS未定位 |
| 高度保持 | 白(慢闪) | 飞控已过初步自检 |
| 高度保持 | 白(快闪) | 飞控已完成自检 |
| 高度保持 | 白黄灯闪烁 | GPS未定位有其它警报请连接地面站查看 |
定位模式:
| 飞行模式 | 对应灯颜色 | 对应灯语 |
|---|---|---|
| 定位模式 | 绿蓝交替闪烁 | 飞控已过初步自检,且GPS未定位 |
| 定位模式 | 绿(慢闪) | 飞控已过初步自检 |
| 定位模式 | 绿(快闪) | 飞控已完成自检 |
| 定位模式 | 绿黄灯闪烁 | GPS未定位有其它警报请连接地面站查看 |
手动模式
| 飞行模式 | 对应灯颜色 | 对应灯语 |
|---|---|---|
| 手动模式 | 红蓝交替闪烁 | 飞控已过初步自检 |
| 手动模式 | 红(慢闪)) | 飞控已过初步自检 |
| 手动模式 | 红(快闪)) | 飞控已完成自检 |
辅助功能
| 模式 | 闪烁颜色 |
|---|---|
| 自驾模式 | 绿闪烁 飞行器解锁后此灯为常亮 |
| 返航降落 | 绿闪烁 飞行器解锁后此灯为常亮 |
| 原地降落 | 黄闪烁 触发保护动作 |
| 高度锁定自驾 | 绿闪烁 飞行器解锁后此灯为常亮 |
| AB点设置 | 红绿蓝交替闪烁 仅在触发AB点记录时闪烁 |
 |
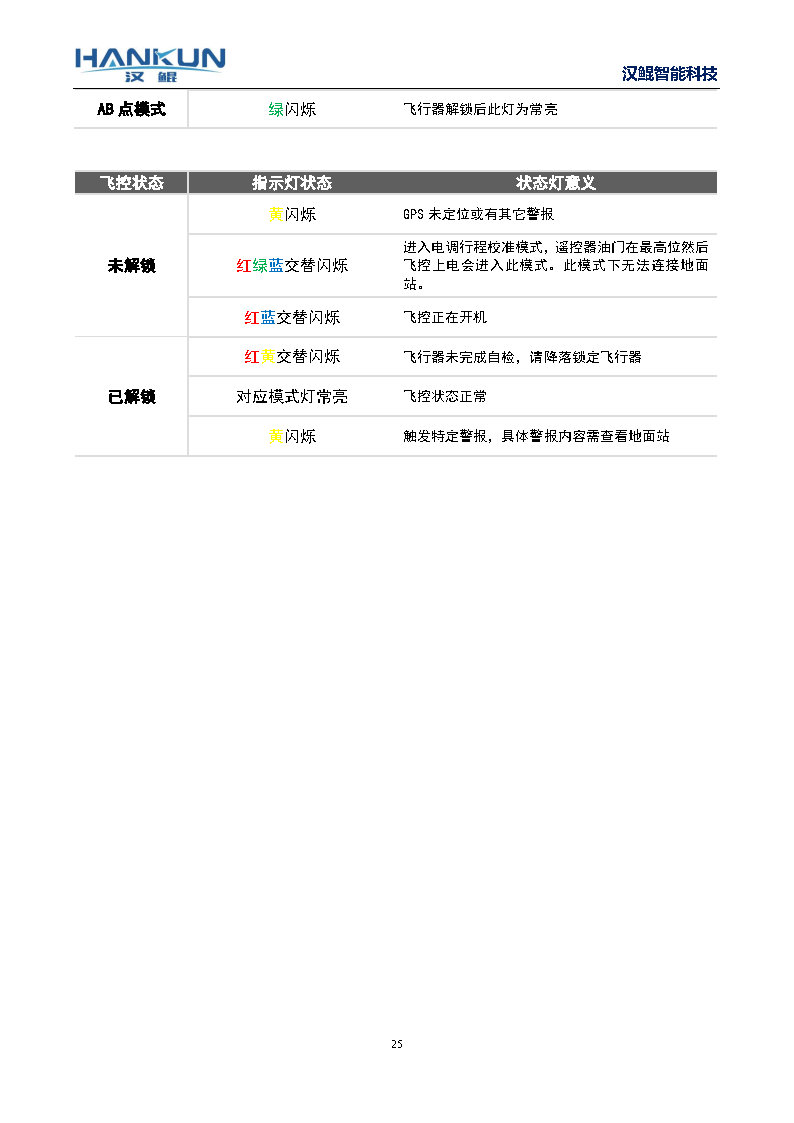
其他指示灯
未解锁:
黄闪烁 GPS未定位或有其它警报
红绿蓝交替闪烁 进入电调行程校准模式,遥控器油门在最高位松开电池后进入此模式。此模式下无法连接地面站
红蓝交替闪烁 飞控正在开机
红黄交替闪烁 飞行器未完成自检,请降落稳定飞行器
已解锁:
对应模式灯常亮 飞控状态正常
黄闪烁 触发特定警报,具体查看地面站内容
下方为指示灯图示3
FS++飞控解锁动作设置以及起降须知
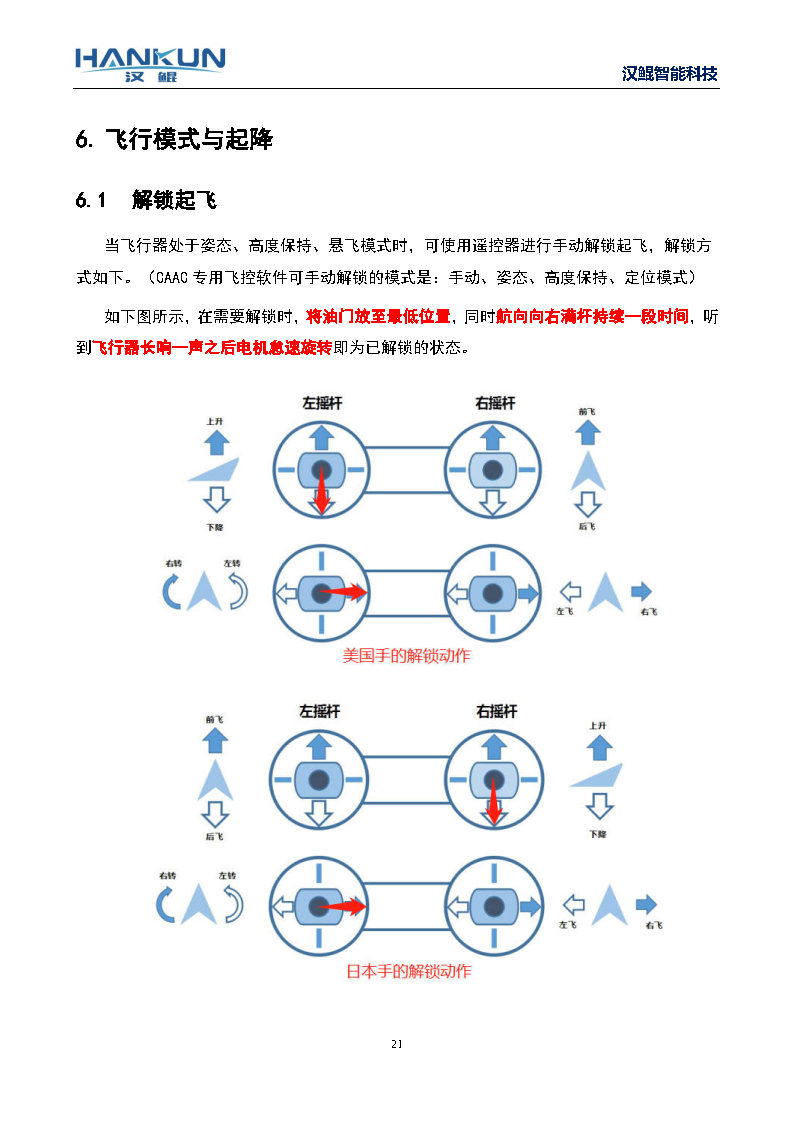
解锁起飞
当飞行器处于姿态、高度保持、悬飞模式时,可使用遥控器进行手动解锁起飞。解锁方式如下。(CAAC专用飞控软件可手动解锁的模式是:手动、姿态、高度保持、定位模式)
起飞动作为油门最低,航向最右,维持位置3-5秒,听到电机发出响,LED灯从闪烁变成常亮后,解锁成功,此时电机会以怠速启动。
另外地面站右上角也会出现已解锁的标识
如下图所示
下方为解锁图示
飞行器无法解锁的情况
当触发了飞行器的解锁动作后,飞行器仍然无法解锁,可能是处于以下的情况,用户可以先自行排除
1.飞行器有警报未消除,具体表现为LED中夹杂这黄色的警报灯,此时请先连接上地面站,查看对应的警报内容
2.遥控器油门设置反向,一般遥控器内都能设置通道的反向(也成为舵机反向),若是这个原因导致的无法解锁,通常伴随着飞行器进入电调行程模式(红蓝灯频闪),此时是非常危险的,因为桨叶有可能会因为电调行程而起转,此时千万不要先松杆,保持不动先将飞行器断电。断电后,先设置好舵机反向,出现该情况的主要原因是遥控器校准时,没有进行通道的一致性检查。
3.杆量没有拨打到位,出现该情况,首先拨打的时候保持解锁杆位久一些,若仍不能解锁,可以连接上地面站,打开遥控器校准界面,对照着通道行程量打解锁动作,看看是否能到达最低值,若不能到达,需要进行遥控器内部的摇杆校准,校准完成后重新校准一遍遥控器
4.若还是不能解锁,请联系群内工程师
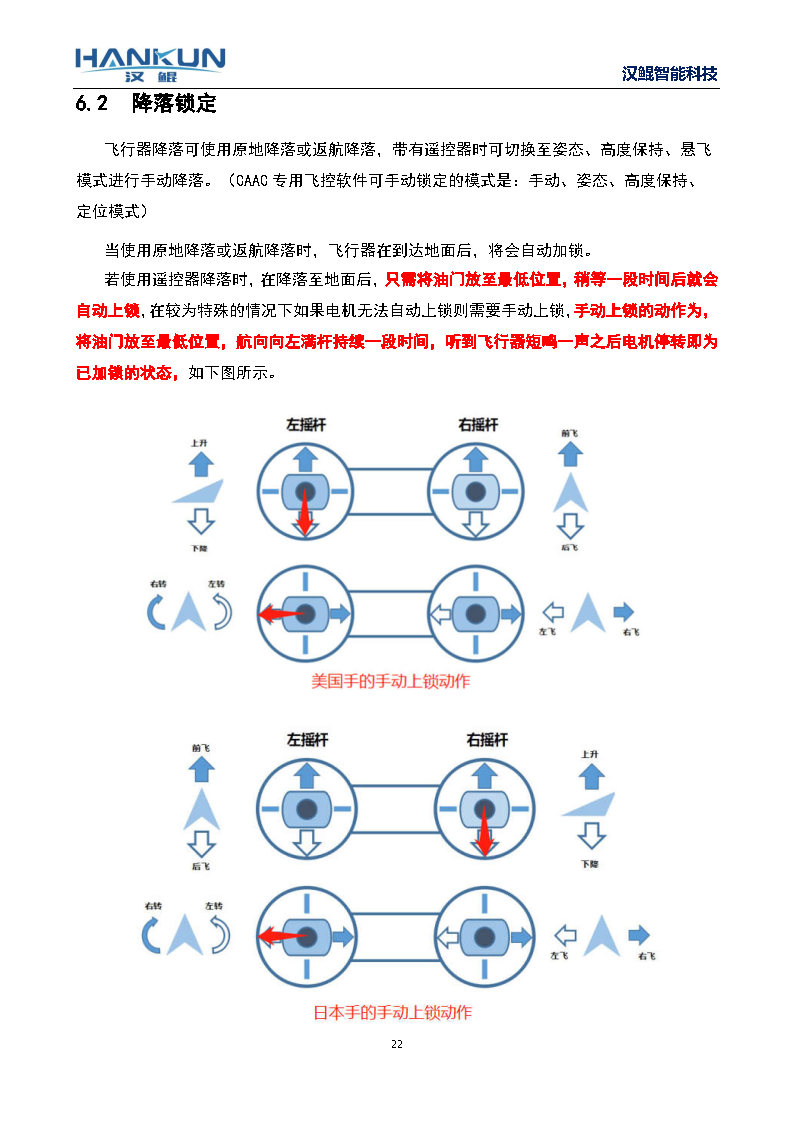
降落锁定
飞行器降落可使用原地降落或返航降落,带有遥控器时可切换至姿态、高度保持、悬飞模式进行手动降落。(CAAC专用飞控软件可手动锁定的模式是:手动、姿态、高度保持、定位模式)
当使用原地降落或返航降落时,飞行器在到达地面后,将会自动加锁。
若使用遥控器降落时,飞行降落至地面后,只需将油门放至最低位置,稍等一段时间后就会自动上锁。在较为特殊的情况下如果电机无法自动上锁则需要手动上锁,手动上锁的动作为,将油门放至最低位置,航向向左满杆持续一段时间,听到飞行器短响一声之后电机停止旋转即为已加锁的状态,如下图所示。
飞行器无法锁定的情况
1.可以先尝试强制加锁动作,看是否能加锁
2.切换模式,尝试姿态模式,手动模式下是否可以加锁,将飞机降到地面怠速之后,可以试试连接地面站,通过地面站主页面的左上角SOS的按钮强制锁定电机
3.可能是电调校准的问题,重新校准一下电调行程
解锁动作更换
连上地面站后,可以在参数设置-解锁/加锁中设置自己喜欢的解锁方式
下方为解锁动作更换图示

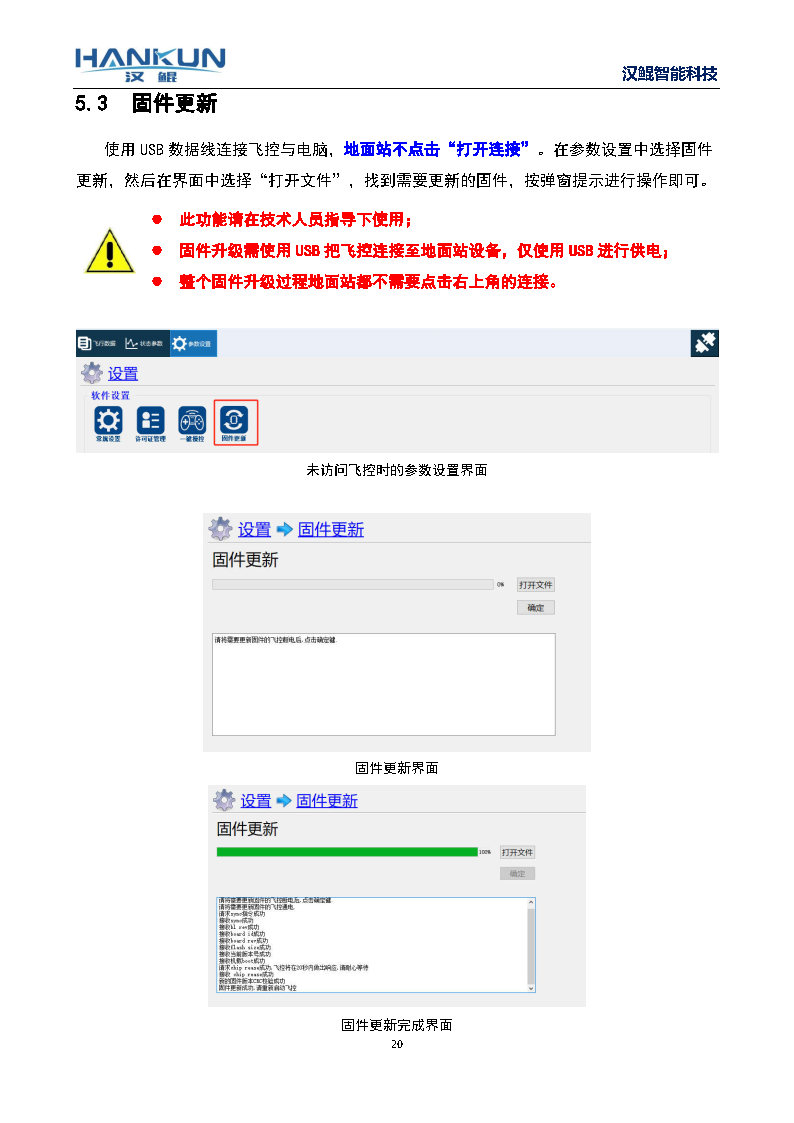
FS++飞控固件更新
1.打开地面站 使用USB给飞控供电 但无需连接上地面站
2.参数设置-固件更新
3.打开文件-打开后缀名为.rof的文件
4.飞控断电(拔掉电脑端USB口)地面站上点击确定
5.飞控上电 静待绿条加载完毕 提示更新成功
6. 若提示固件版本一致 说明该飞控已经烧录同款固件 无需再次烧录
下方固件更新图示
固件更新的教学视频连接:
[固件更新](【飞控健康与自我检测:固件更新与配置更新】 https://www.bilibili.com/video/BV1xA411Z7vc/?share_source=copy_web&vd_source=3294eedac1cf618d2dbda88d67edf41b)
FS++飞控配置更新以及补丁更新
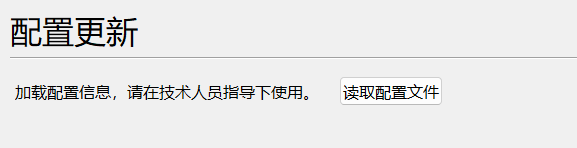
配置更新
连接上地面站,参数设置-更新配置
点击读取配置文件,上传后缀.cfg的文件
下方配置更新图示
配置更新的教学视频连接(前半段是固件更新,后半段是配置更新):
[配置更新](【飞控健康与自我检测:固件更新与配置更新】 https://www.bilibili.com/video/BV1xA411Z7vc/?share_source=copy_web&vd_source=3294eedac1cf618d2dbda88d67edf41b)
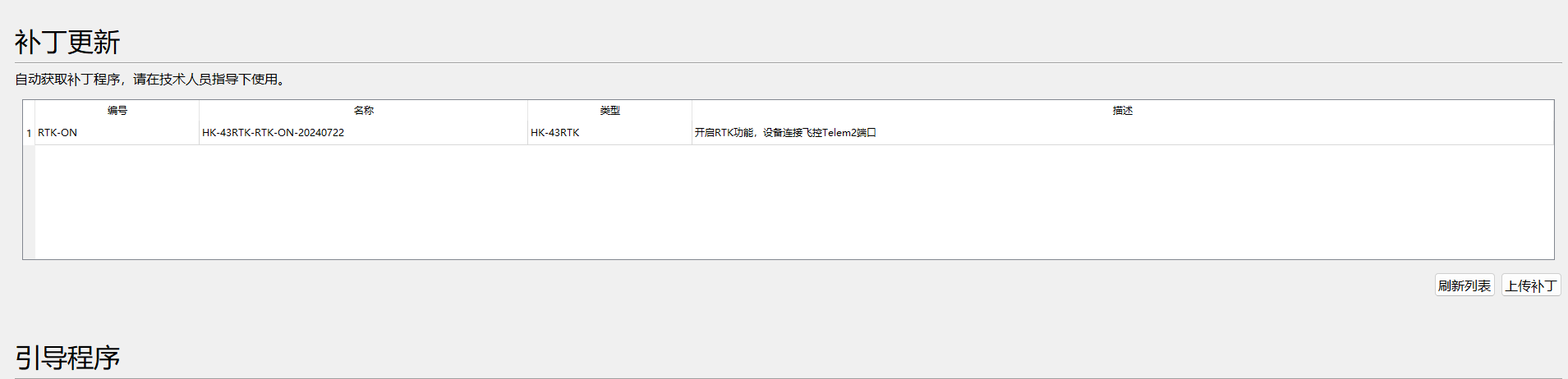
补丁更新
连接上地面站,电脑处于联网状态,参数设置-更新配置
补丁更新,点击刷新列表,会出现工程师在后台添加的补丁文件,点击上传补丁,等待上传成功
下方补丁更新图示
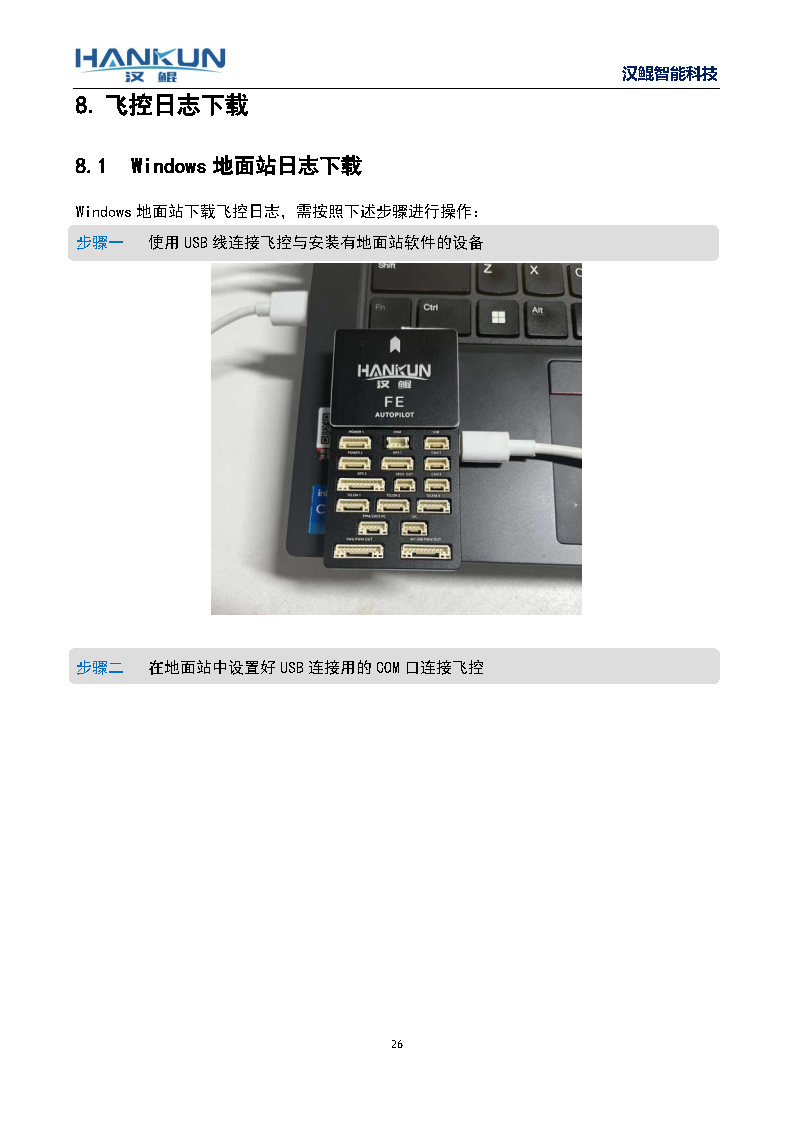
FS++飞控日志下载
1.请使用USB链接地面站(蓝牙或者数传下载缓慢容易失败请不要使用)
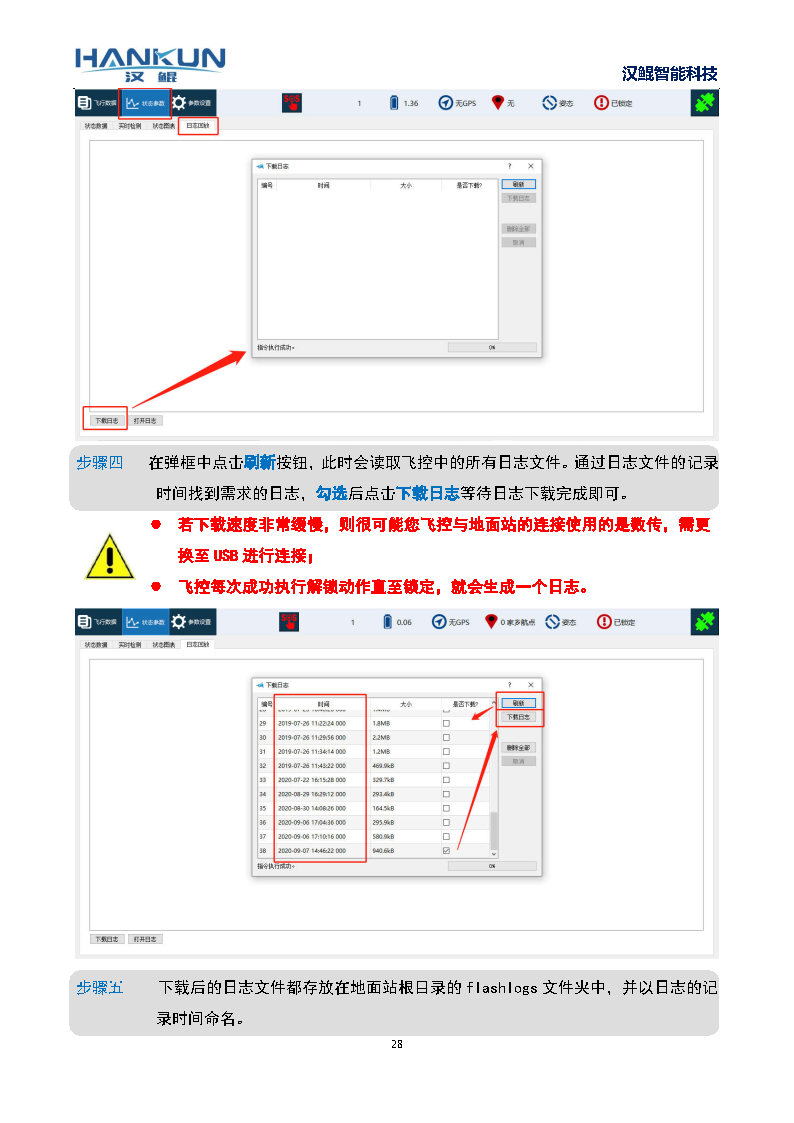
2.点击状态参数-日志回放-下载日志
3.点击刷新刷出日志列表,找到需要查看的日志(不确定是哪一个的话,可以选择时间最新的)
4. 点击下载日志,等待下方下载进度条完成
5.退出地面站,在桌面的地面站图标右键点击打开文件所在位置
6.找到flashlog文件夹,下载的日志默认保存至该文件夹
下方日志下载图示
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)