汉鲲整机使用指南(配LRD24数传)
在汉鲲这里购买了整机,送到了,没用过,不会用,操作流程来了,汉鲲的整机用户,可以根据以下步骤,一步一步做,保证您能飞的好好的!
第一步,检查飞行器外观
检查什么内容呢
1.有没有磕碰,尤其是电机,电机如果出现明显磕碰,那么请联系工程师
2.脚架是否有歪,歪了,松一下脚架底部的螺丝,调整成水平
3.电机有没有明显的歪了,大概率不会,因为出厂都打了铆钉
4.GPS有没有歪,GPS指向应该是要与机头方向平行
第二步,接入遥控器
LRD24数传款整机一般没有给您配遥控器,您需要安装自己的遥控器,遥控器的SBUS通道需要接入飞控的PPM/SBUS接口,另一端接您的接收机。
第三步,连接地面站
请点开下方连接仔细学习,细节较多,需要一些耐心。
https://hankunuserguide.helplook.net/docs/ru-he-lian-jie-han-kun-de-di-mian-zhan
第四步:遥控器校准
连上地面站后,若遥控器的通路正常,在地面站的遥控器校准界面能看到相应的映射,并且拨杆绿条会变动,若未看到绿条,则说明遥控器的通路有问题,需要检查接线是否错误,或者没有和接收机对频。
若一切正常,那么可以开始进行遥控器校准,遥控器校准的教程如下
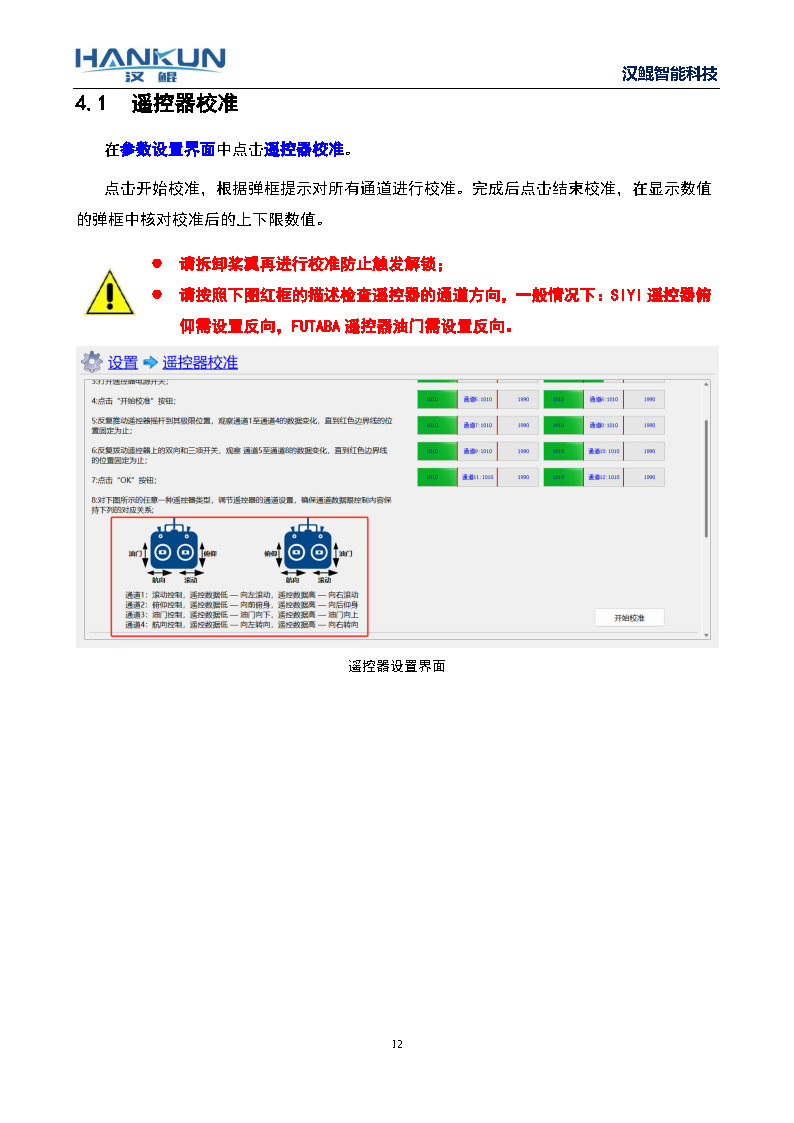
在参数设置界面中点击遥控器校准。
1:确保遥控接收器与飞控模块正确连接并正常工作(右侧通道映射上有绿条且拨动杆时会跟随变动)
2.尽量不要安装螺旋桨(若在安装螺旋桨的情况下校准,注意不要触发解锁动作)
3.确保遥控器微调全部归零(地面站校准前最好先做一次摇杆校准)
4.点击“开始校准”按钮并确认弹窗 5.反复推动遥控器摇杆到其极限位置,观察通道 1 至通道 4 的数据变化,直到红色边界线的位置固定为处.(尽量拨到最大值和最小值,可能需要用点力气)
6.反复拨动遥控器上的双向和三项开关,观察 通道 5 至通道 8 的数据变化,直到红色边界线的位置固定为止;
7.确保所有杆在中位时,点击”校准结束“
8.对最终校准值进行确认,前四个通道保证最大最小值,中间值一致(误差必须在 10 以内)
9.再次拨杆,核对每个通道的正反向是否正确(遥控器校准页面下方有图示)若不正确,可在遥控器内部设置舵机反向,您使用自己的遥控器时,这一点非常重要,尤其是需要确认油门和俯仰通道是否反向(FUTEBA遥控器经常出现油门反向的问题)需要对照界面上所写的映射关系仔细核对
下方为遥控器校准图示
遥控器校准的教学视频链接:
下方为遥控器校准的视频(若客户提起遥控器校准,请发送此链接)
[遥控器校准](【试飞前检查第一步-遥控器校准】 https://www.bilibili.com/video/BV191WEetETU/?share_source=copy_web&vd_source=3294eedac1cf618d2dbda88d67edf41b)
第五步,马达测试
这一步主要是确认,在运输过程中,是否有电机因碰撞而损坏
马达测试请注意,整机用户无需卸桨!!,电机顺序,桨叶顺序都是对的,因为发货之前是有试飞过的!!!
您只需要检查每个电机转的时候是否顺畅即可
马达测试的教程如下方连接
https://hankunuserguide.helplook.net/docs/uj1xpeOl#马达测试(电机测试)
第六步,磁罗盘校准
这一步必须抱着飞机,电脑跑到外场去做,并且飞行器上电之后,要先等他定位状态好了,才开始磁罗盘校准
点击下方连接跳转到磁罗盘校准的详细教学
https://hankunuserguide.helplook.net/docs/uj1xpeOl#磁罗盘校准
第七步,起飞
1.当前五步都确认没问题后,可以准备解锁起飞。
2.起飞前请确保电池电量充足,主控开机,左上角SA杆为切换飞行模式的杆(姿态,高度保持,GPS悬飞)
其中紫灯为姿态模式,白灯为高度保持,绿灯为GPS模式
3.将模式切至GPS,等待飞行器定位完成,刚上电的时候,灯是会夹杂着黄灯闪烁的,这是因为飞控自检和收星需要时间,并且飞控要确认没有任何的警报信息,才允许起飞。
4.当灯变成单色闪烁,没有黄灯的时候,允许解锁起飞(紫灯单闪或者白灯单闪或者绿灯单闪),此时切换至姿态模式进行起飞(以确保出现不可控问题时候的对飞行器的控制权最大),前提是试飞人员要有能力飞姿态模式。
5.解锁动作为,油门最低,航向最右,俯仰横滚居中不动,拨杆到位持续3S左右,灯会从闪烁变为常亮,此时已解锁,需要立刻推杆起飞。
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)