电子评分WIN地面站使用教程(蓝牙款)
汉鲲电子评分地面站概述:
该款地面站意在给学员飞行提供精准的位置信息,并通过反馈的定位信息,准确的画出学员在自旋飞行以及八字飞行中的飞行轨迹,配合地面站的其他功能,达到训练学员参加考试,大幅提高通过率的效果。
该款地面站共分为两款,一款是 Windows 端地面站,另一款是 Android 端地面站,分别适应不同的使用偏好。本文介绍的是 Windows 端地面站。
电子评分地面站安装
电子评分地面站软件下载链接
电子评分地面站安装步骤(SE/S2 地面站安装步骤)
第一步:解压压缩包
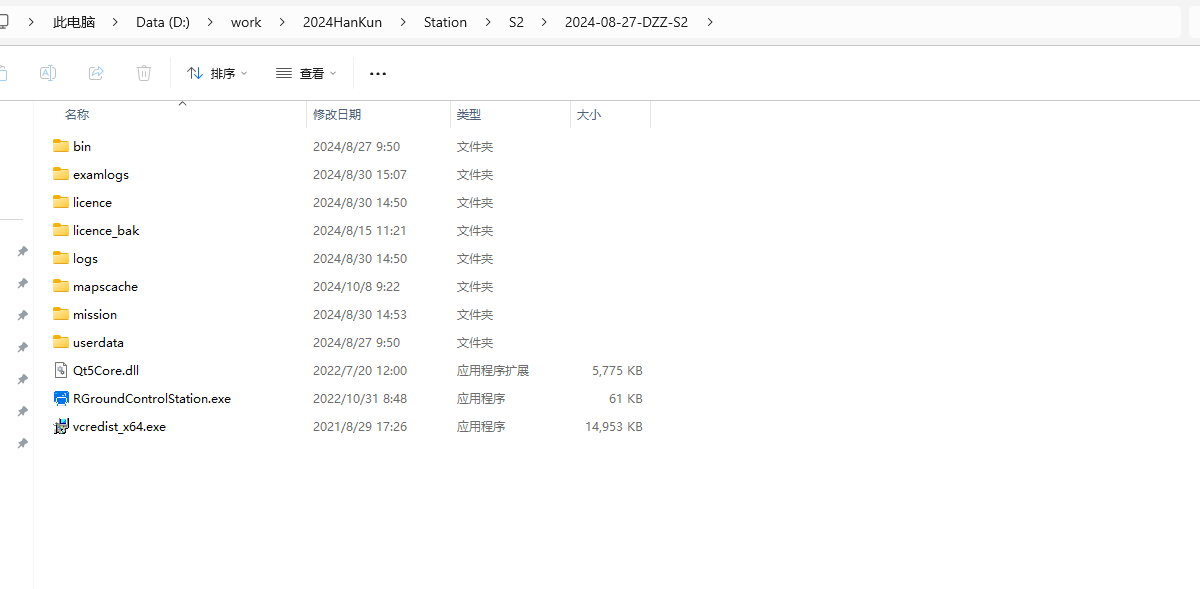
注意:请完全解压出来再使用,不要在解压软件中直接打开文件使用
请解压到完全英文的路径,路径内不要有中文(此电脑,C,D 盘主盘其实是英文)
第二步:找到解压文件里的RGroundControlStation.exe文件,双击打开
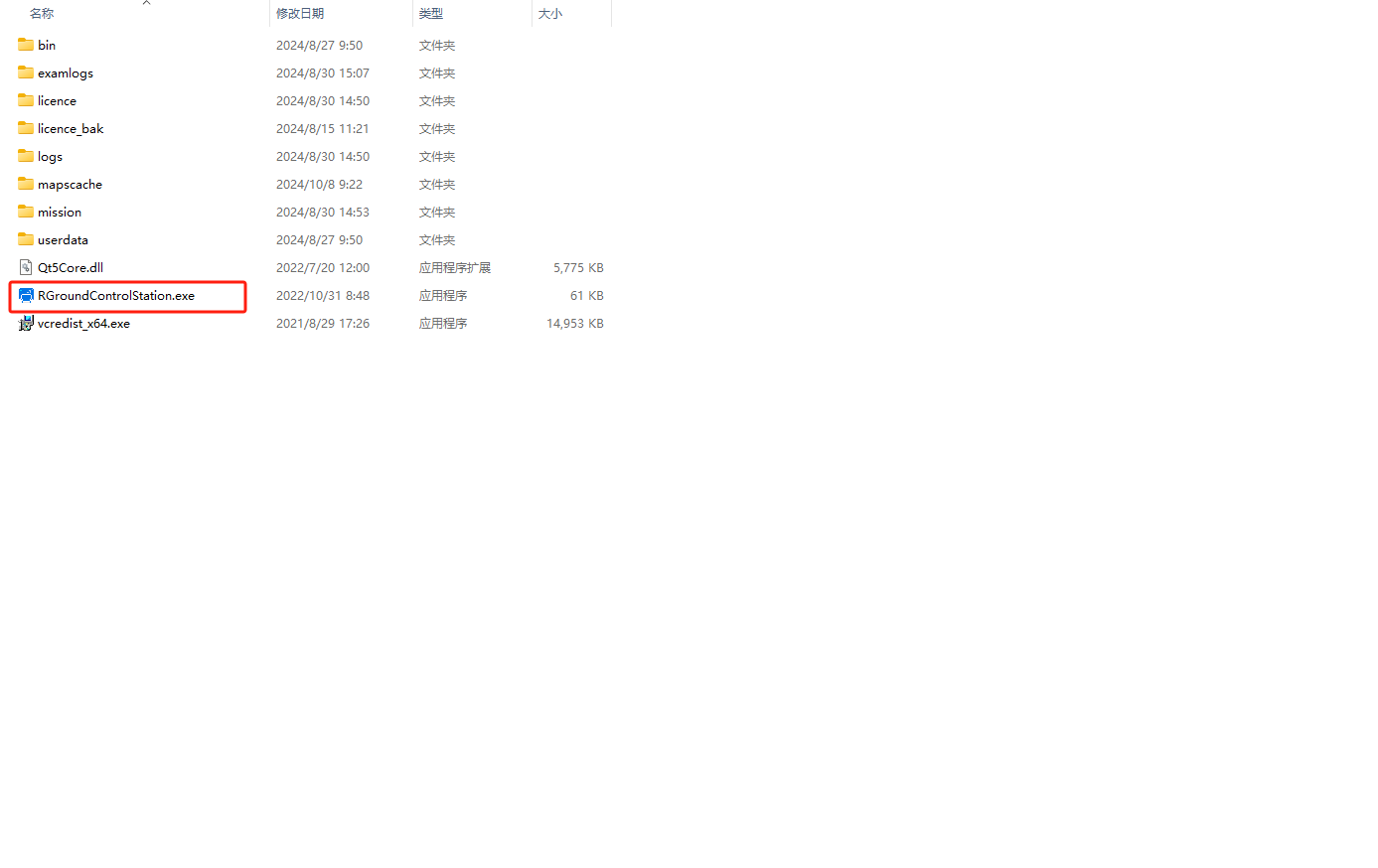
若打开后出现崩溃现象,可以尝试双击允许环境配置软件Vcredist_x64.exe
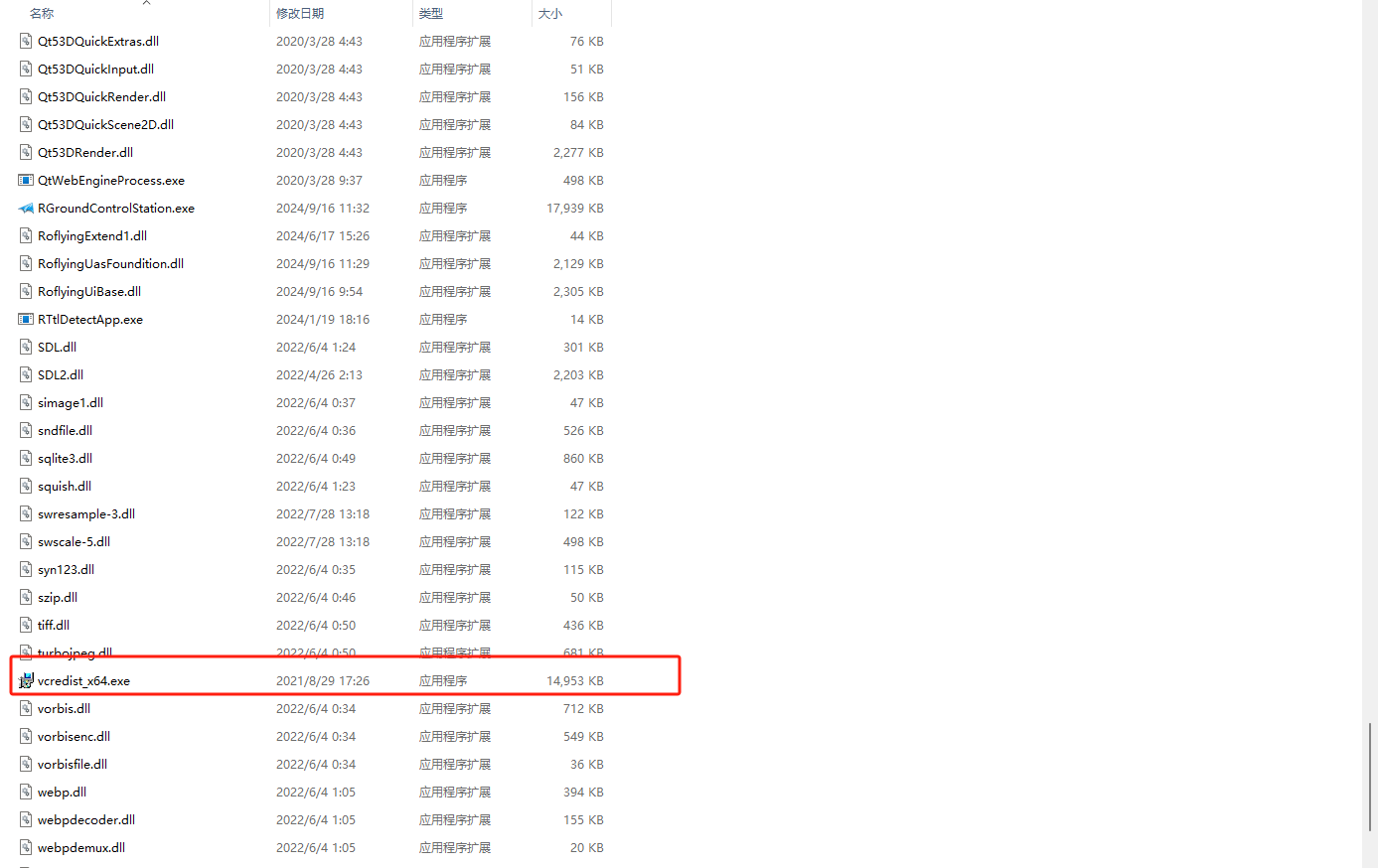
若环境配置文件安装失败,尝试换一台电脑安装软件试试
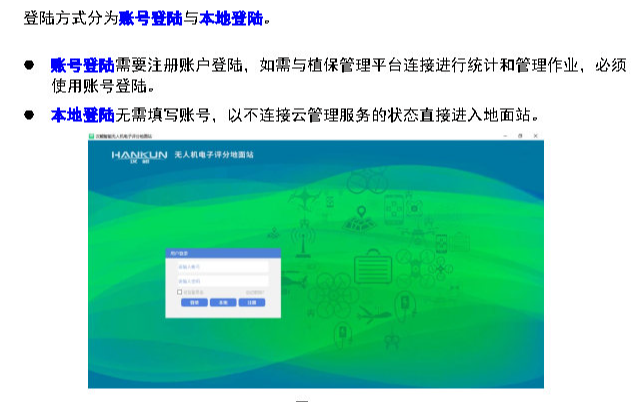
登陆方式
账号登陆:账号登陆是需要自行注册的,如果需要使用云平台的话,必须账号登陆,提供给有定制需求的用户使用的,不开放给一般培训用户
本地登陆:无需填写账号,不连接云管理平台,直接进入地面站,这是一般培训用户使用的方式
登陆后有两个界面,此时是未连接任何电子桩设备的状态,因此页面空白
飞行数据页面
参数设置界面
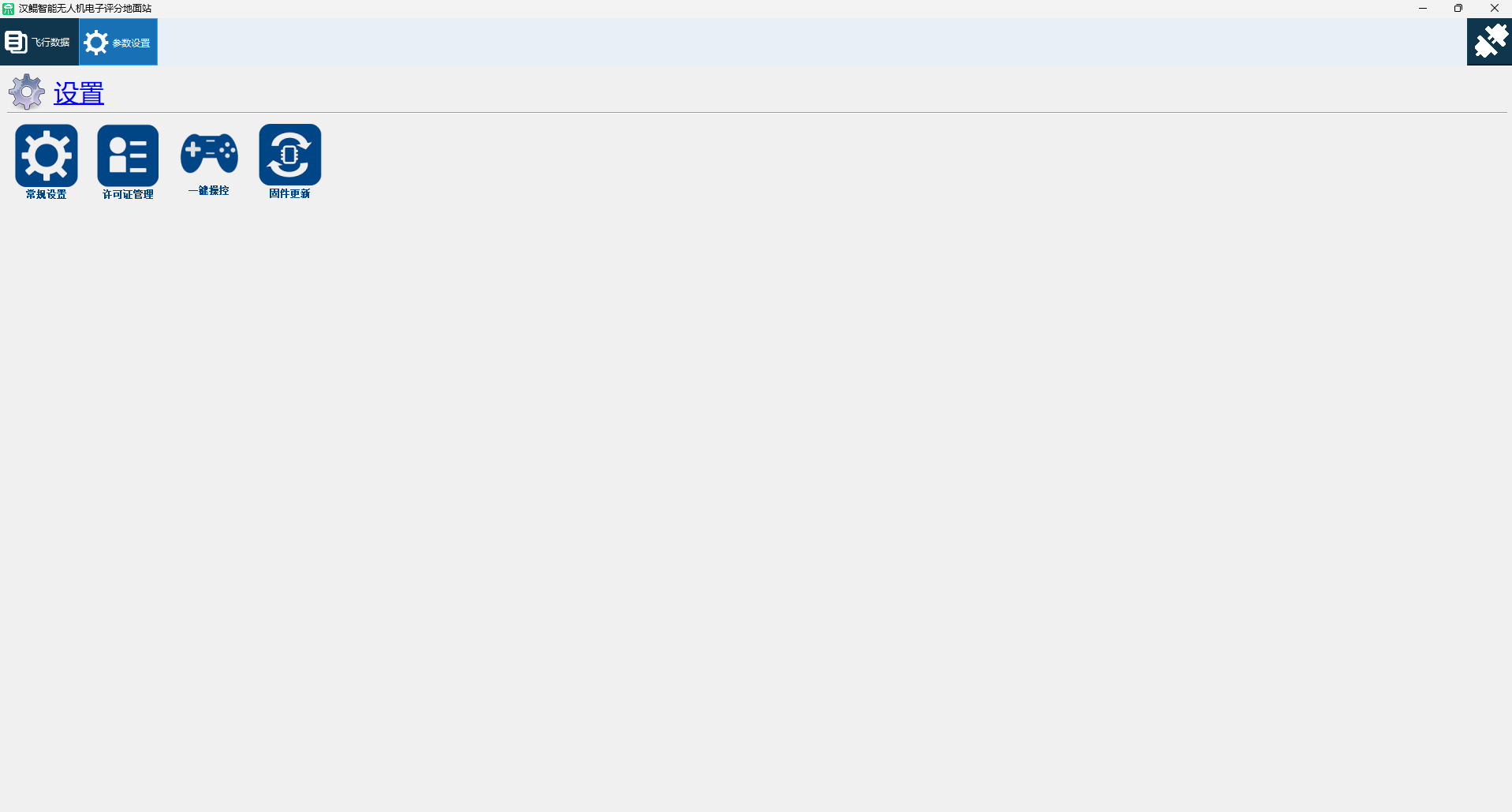
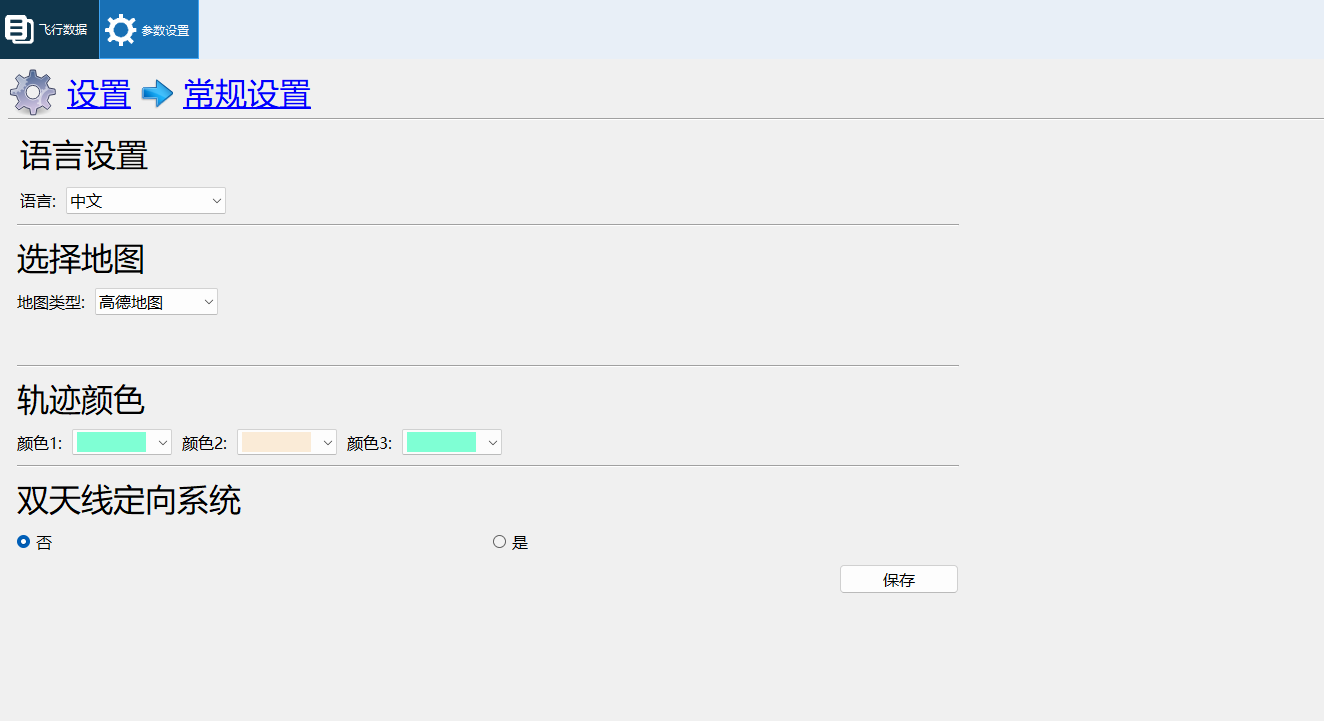
常规设置
- 语言设置:
设置中英文,喜欢训练的途中学一手英文的客户可以切换成英文 - 地图设置:
喜欢卫星地图的设置成微软混合,
喜欢电子地图的设置成高德地图,
喜欢谷歌地图的对不起,谷歌不喜欢你(谷歌已禁用中国区服务) - 轨迹颜色
可以设置喜欢的飞行轨迹的颜色,颜色很多,听说粉色通过率最高 - 双天线定向系统
S2/SE/M1 均是单天线设备,这里必须填否,不然角度可能会偏差 90°,相反,如果发现自己的设备角度与实际方向偏差 90° 左右,可以来这里看看是不是选择了“是”
许可证管理
每一个设备都对应一个许可证,在连接地面站之前,要先检查是否有获取到许可证
许可证获取有两种方式:
- 使用最新版本的汉鲲超视距地面站,注意是最新版本的,未更新的需要去官网更新,保持联网状态,连接设备的时候会自动获取许可证
- 特殊情况下,工程师会根据情况给用户发许可证,用户需要在许可证管理页面下增加该许可证文件后方可连接设备
- 特别注意的是,在使用 M1 设备时,许可证要留意功能这里显示的是“外置评分系统”还是“培训功能”,外置评分功能的许可证是用于电子评分地面站,而培训功能的许可证是用于培训地面站

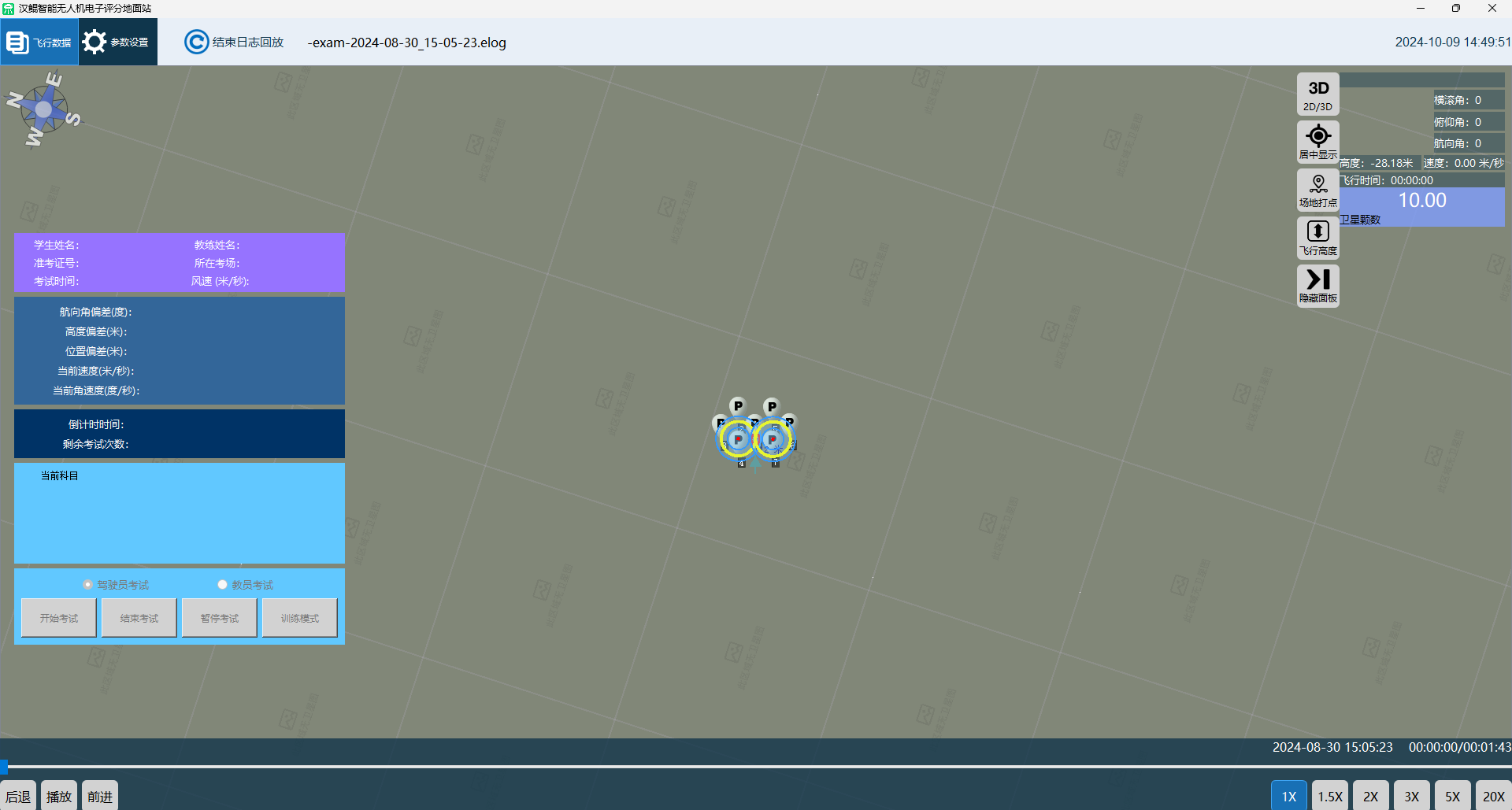
日志回放
点击上方日志回放,可以回放考试的录像
考试录像是自动下载的,当一个学员完成完整的考试后,地面站文件夹会出现对应的考试录像,可以通过日志回放功能读取
电子评分系统连接地面站(SE/S2 连接地面站)
当基站已经架设完毕,并且机载端也安装完毕后,单击长按蓝牙模块,使其开机
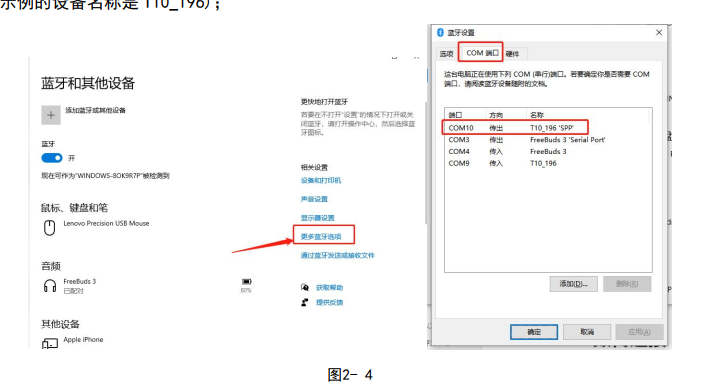
打开电脑蓝牙,搜索名称为"T10_XXX"的蓝牙(有两个同名的,需要都连接上,连接了其中一个之后,可以刷新一下蓝牙列表搜索第二个),配对码均为 1234
配对完成后在 windows 蓝牙界面中点击更多蓝牙选项,确认方向为传出的端口号(下图示例的设备名称是 T10 196)
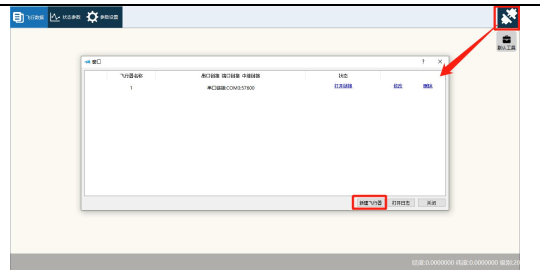
随后打开地面站,在右上角点击飞行器连接,然后点击的新建飞行器,
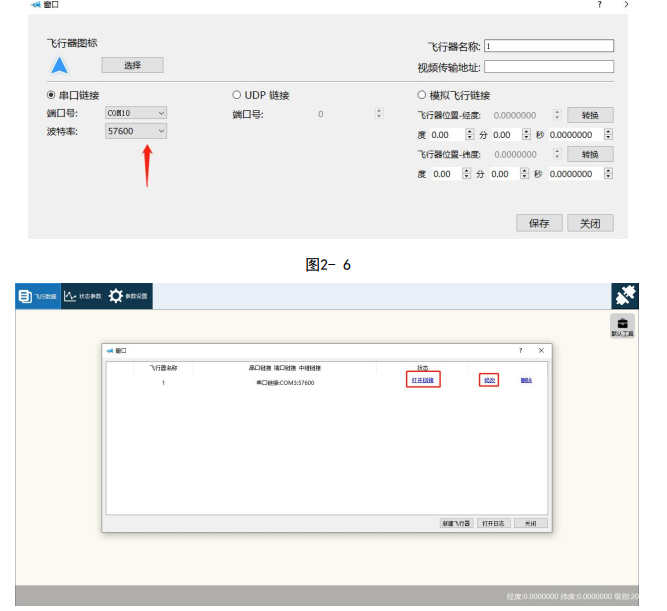
在地面站的新建飞行器中,选择在更多蓝牙选项中确认的传出的端口号,波特率为 57600,点击保存,随后点击打开连接就可以进行电子桩的连接了。
注意:第一次连接地面站需要连接网络,以下载许可证进行验证。
连接成功后,会出现读条,并且主页面会多出工具栏
参数设置界面
连接上设备之后,参数设置界面会增加几个功能
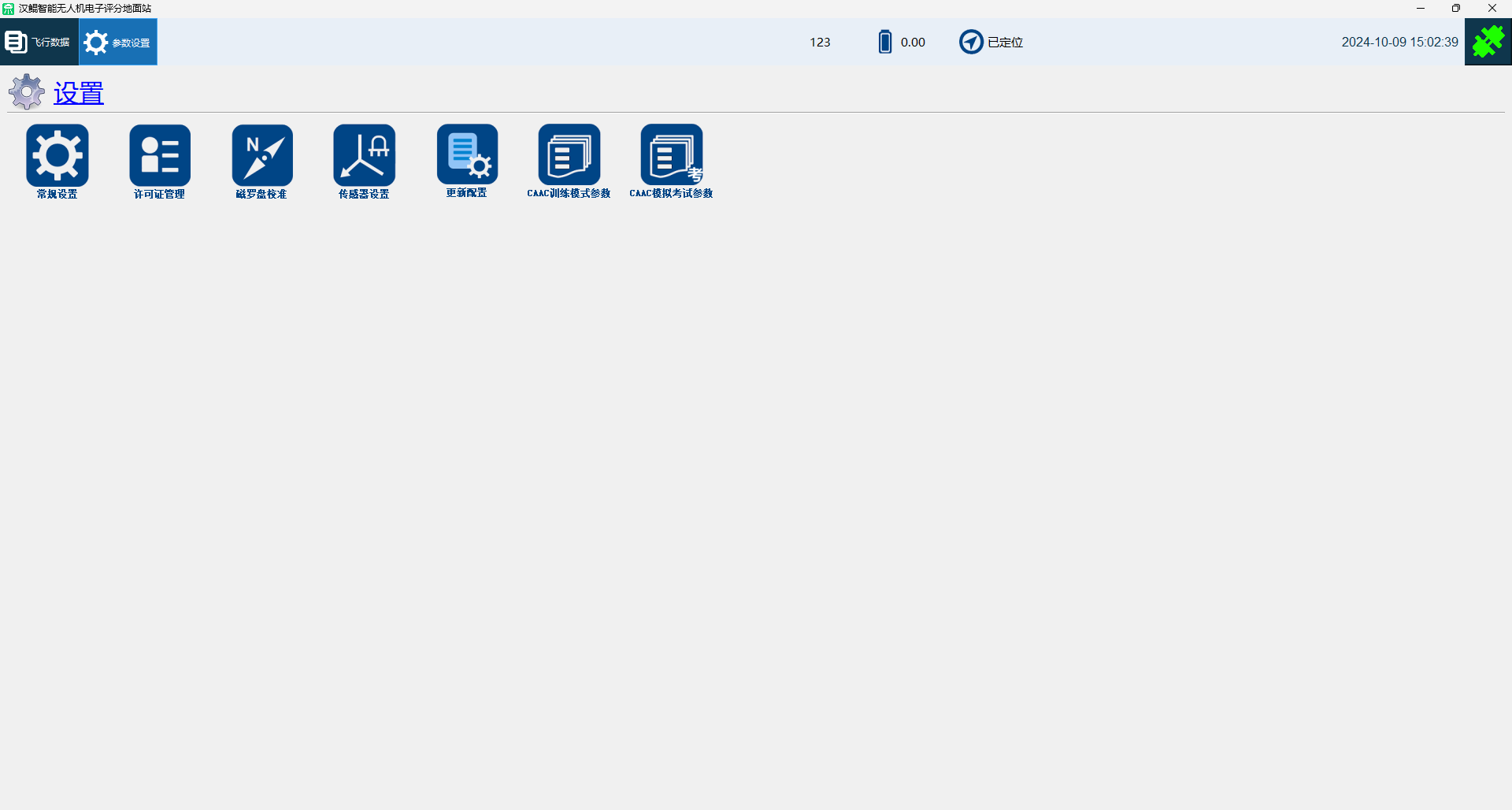
1.传感器设置
RTK 机载端位置补偿设置
实际量出 RTK 机载端与中心位置的距离,然后把距离输入至 GPS 的栏目中(IMU 一栏无需填写),并且确保正负值设置无误,注意数值的单位为米:
X 为前后位置,RTK 机载端在中心前面,则 x 输入正值,反之负值;
Y 为左右位置,RTK 机载端在中心右边,则丫输入正值,反之负值;
Z 为上下位置,RTK 机载端在中心下面,则 Z 输入正值,反之负值。

2.训练模式参数/模拟考试参数
这两个默认均是考试标准的参数,有需要严格要求考生的,或者是对考生从宽处理的,可以通过修改里边的参数,达到控制考试难易的功能
训练模式参数
- 电子桩训练模式用于给学员针对自旋或八字飞行科目,单独进行重复训练使用。在出现动作错误时,可以继续完成当前动作以达到训练目的(电子桩模拟考试则是当前机会直接失败,重新开始该动作的考试)。
- 在完成一次考试后,会根据当前的数据进行一次简单评分,最终平均差值在最小值与最大值之间则得 5 分,在最小值与最大值范围外则为 0 分。
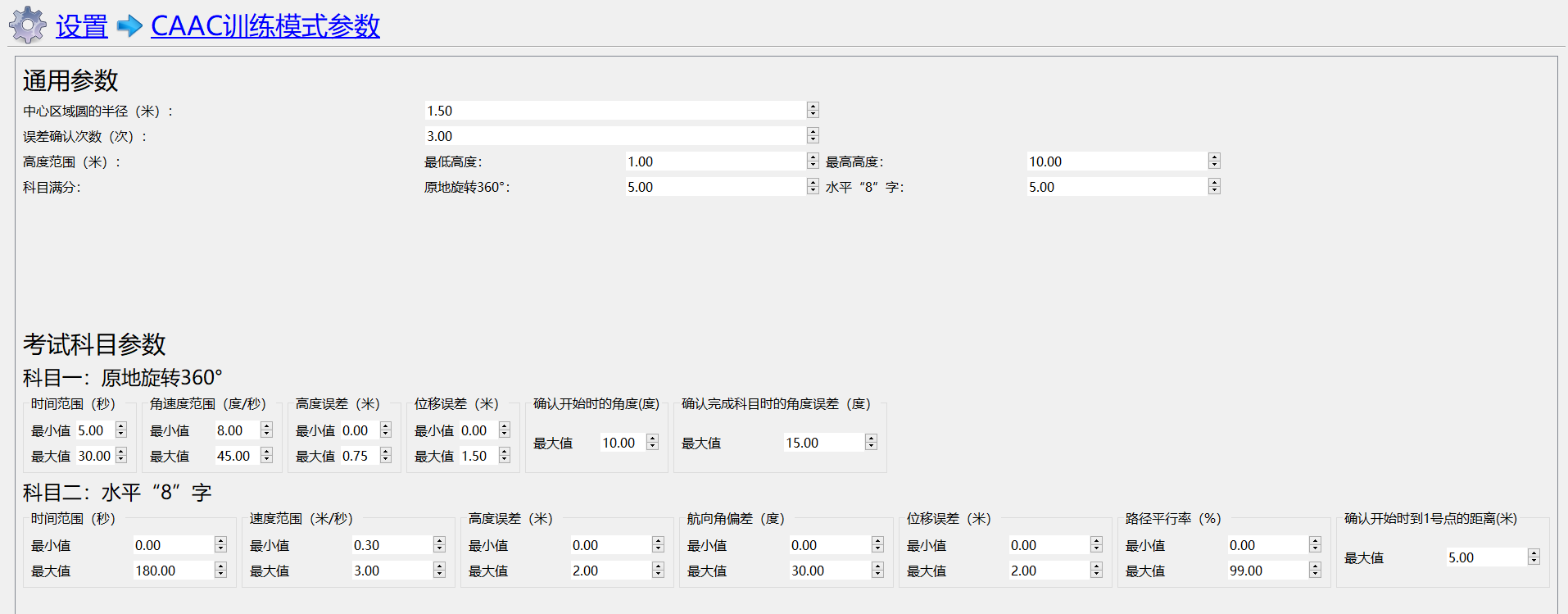
通用参数
- 中心区域圈的半径:
系统判定开始的位置范围,当飞机在此圈内满足自旋或 8 字飞行的条件时,会自动开始该项目的考试并进行语音播报。 - 误差确认次数:
系统判定此次操作失败前对误差的确认次数,此数值设置越高,考试会更简单些(不建议设置过大,设置过大的数值会导致考试结果失去真实性)。 - 高度范围:
进入中心区域时系统所允许的飞行高度,超出或低于所设高度范围进入中心区域圈将显示高度过高/过低并失去一次考试机会。 - 科目满分:
设置科目的打分制度
科目一:原地旋转 360°
- 时间范围:
规定自旋从开始到结束的完成时间。 - 角速度范围:
规定自旋时的旋转速度范围。 - 高度误差:
规定自旋时飞机高度与基准高度的差值,其基准高度为开始评分时的高度。 - 位置误差:
规定自旋时飞机位置与中心位置的差值,中心位置为开始评分时的位置(不是红圈的圆心)。 - 间隔角度:
当飞机自旋航向角超出所设角度时(左旋右旋都可以)系统才开始评分。(一般设置为 15)
确认完成科目的角度误差:当飞机自旋回到初始角度 ± 所设误差范围时,系统才会确认学员是否完成自旋科目。(一般设置为 10)
科目二:水平“8”字
- 时间范围:
规定水平“8”字飞行从开始到结束的时间。 - 速度范围:
规定水平“8”字科目的飞行速度范围。 - 高度误差:
规定水平“8”字科目中飞机的高度与基准高度的差值,其基准高度为开始评分时的高度。 - 航向角误差:
规定水平“8”字科目中飞机当前航向角与最佳航向角的差值范围。最佳航向角为地图上显示的圆形 8 字的切线方向。 - 位置误差:
规定水平“8”字科目中飞机与最佳飞行路径的距离范围。设置完成后,地图上的内外圈会按照设置的数值显示。 - 路径平行率:
每 1/4 弧取所有轨迹点,取轨迹和切线夹角偏差度数大于 25° 的所有轨迹点,计算该点位数量占该段弧度点位数量的百分比,超过该值则判断水平八字平行度不合格(一般最大值设置为 40,最小值为 0)。 - 确认开始到 1 号点之间的距离:
规定水平“8”字科目中,按照考试需求在开始 8 字飞行前会有必要的进行位置调整,此设置值即为位置调整的区域大小(一般设置数值与红圈中心一致即可,若需要退出红圈再开始 8 字飞行,则建议设置为 5 米)。
模拟考试模式参数
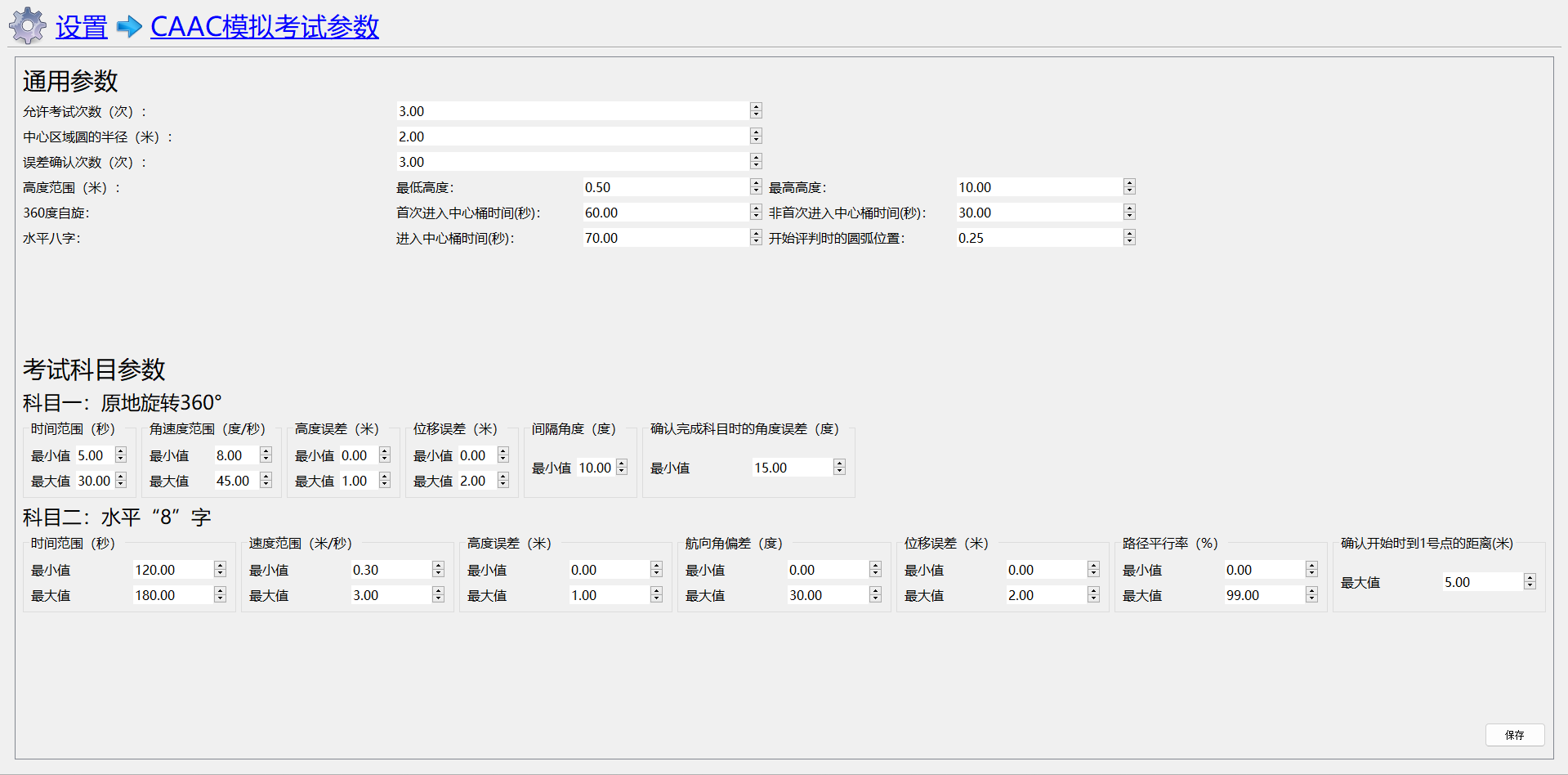
通用参数
- 允许考试次数:
给予考生的考试机会,当考生实际考试次数>所设的允许考试次数时,系统会判定考生考试失败。
中心区域圈的半径:
系统判定开始的位置范围,当飞机在此圈内满足自旋或 8 字飞行的条件时,会自动开始该项目的考试并进行语音播报。 - 误差确认次数:
系统判定此次操作失败前对误差的确认次数,此数值设置越高,考试会更简单(不建议设置过大,设置过大的数值会导致考试结果失去真实性)。 - 360° 自旋科目的进入中心区域时间(秒)首次进入时间:
第一次考试进入中心圈区域的时间限制,超时则失去一次考试机会。
非首次进入时间:自旋失败后再次进入中心区域的时间限制,超时失去一次考试机会。 - 水平八字科目的进入中心区域的时间(秒):
完成自旋科目后进入 8 字前调整航向和飞机位置的准备时间,超时则失去一次考试机会。 - 高度范围:
进入中心区域时系统所允许的飞行高度,超出或低于所设高度范围进入中心区域圈将显示高度过高/过低并失去一次考试机会。
科目一:原地旋转 360°
- 时间范围:
规定自旋从开始到结束的完成时间。 - 角速度范围:
规定自旋时的旋转速度范围。 - 高度误差:
规定自旋时飞机高度与基准高度的差值,其基准高度为开始评分时的高度。 - 位置误差:
规定自旋时飞机位置与中心位置达的差值,中心位置为开始评分时的位置(不是红圈的圆心)。 - 间隔角度:
当飞机自旋航向角超出所设角度时(左旋右旋都可以)系统才开始评分。(一般设置为 15) - 确认完成科目的角度误差:
当飞机自旋回到初始角度 ± 所设误差值时,系统才会确认学员是否完成自旋科目。(一般设置为 10°-15°)
科目二:八字飞行
- 时间范围:
规定水平“8”字飞行从开始到结束的时间。 - 速度范围:
规定水平“8”字科目的飞行速度范围。 - 高度误差:
规定水平“8”字科目中飞机的高度与基准高度的差值,其基准高度为开始评分时的高度。 - 航向角误差:
规定水平“8”字科目中飞机当前航向角与最佳航向角的差值范围。最佳航向角为地图上显示的圆形 8 字的切线方向。 - 位置误差:
规定水平“8”字科目中飞机与最佳飞行路径的距离范围。设置完成后,地图上的内外圈会按照设置的数值显示。 - 路径平行率:
每 1/4 弧取所有轨迹点,取轨迹和切线夹角偏差度数大于 25° 的所有轨迹点,计算该点位数量占该段弧度点位数量的百分比,超过该值则判断水平八字平行度不合格(一般设置为 80)。 - 确认开始到 1 号点之间的距离:
规定水平“8”字科目中,按照考试需求在开始 8 字飞行前会有必要的进行位置调整,此设置值即为位置调整的区域大小(一般设置数值与红圈大小一致即可,若需要退出红圈再开始 8 字飞行,则建议设置为 5 米)
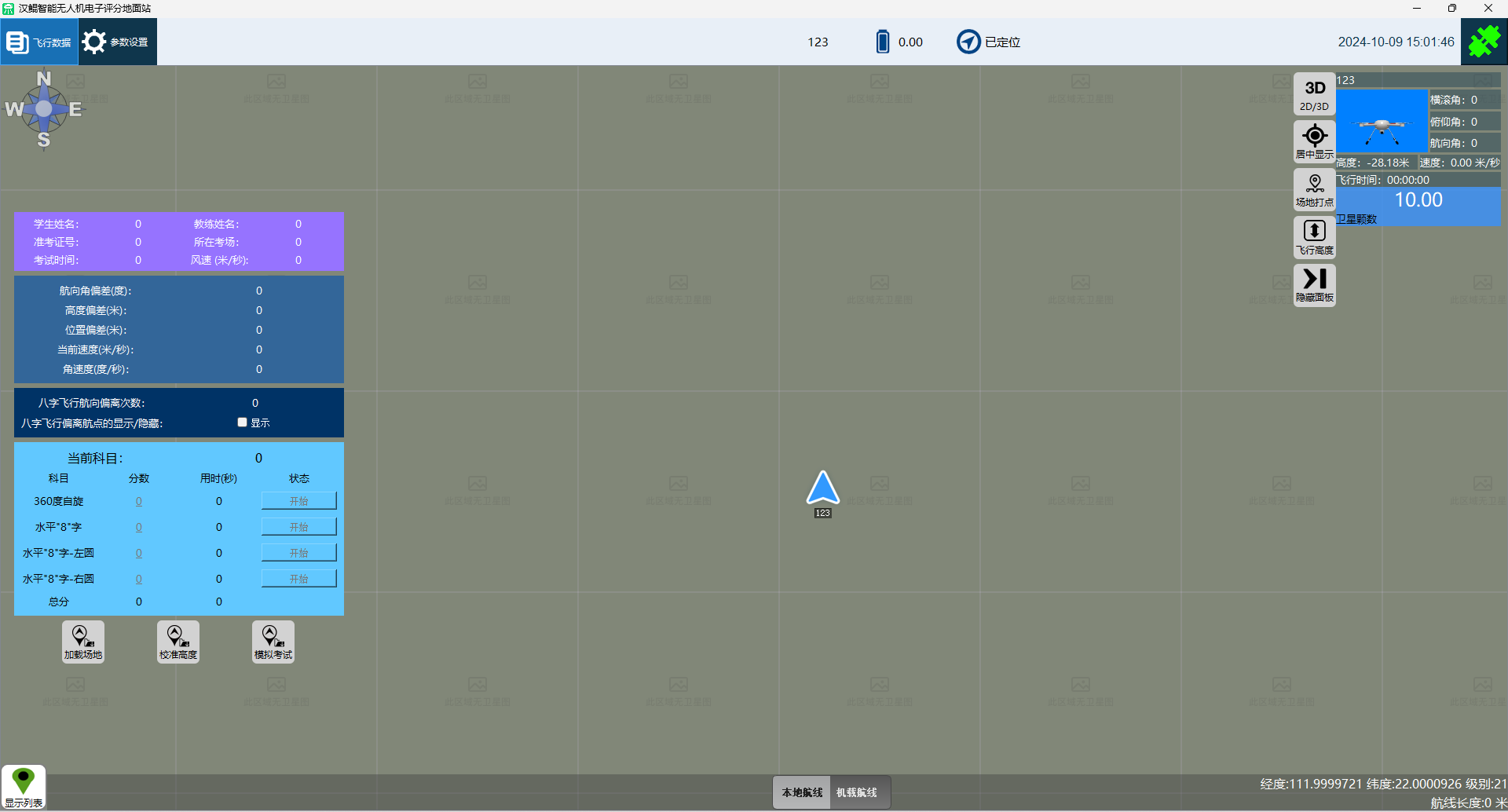
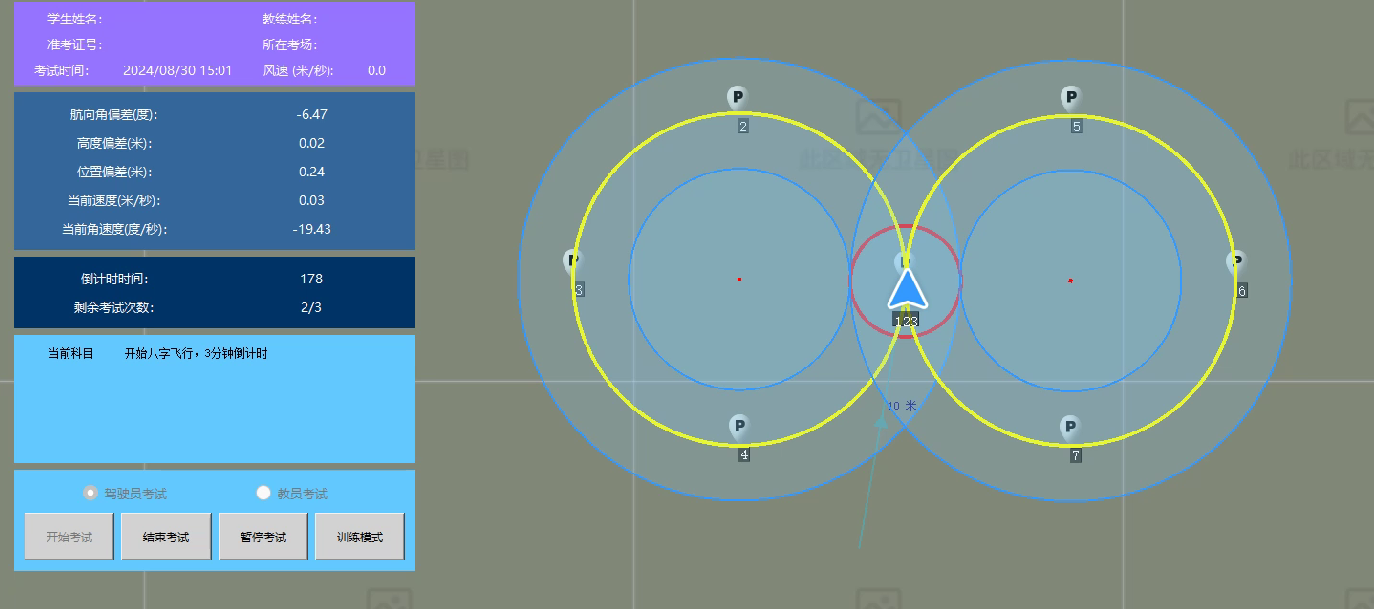
飞行数据页面
左侧操作界面
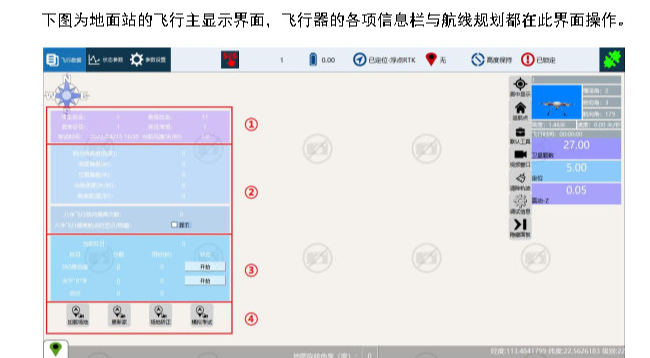
1 考试信息 :
主要记录考生、考官、场地信息
2 当前考试项目的实时数据
当前航向角的偏移量、高度的偏移量、位置的偏移量;小字飞行的航向偏离次数,以及偏离标记的显示/隐藏
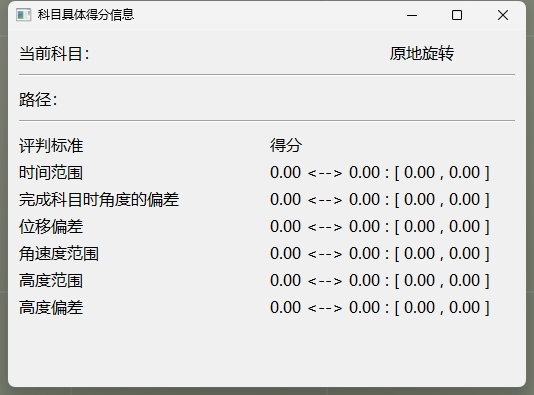
3 考试项目
用于开始/结束考试,并显示对应的总分以及细节分数
4 工具栏
- 加载场地:
加载保存的场地文件 - 校准高度:
用于校准设备的高度,正确是当设备处于地面时,点击校准高度,将当前高度重置为 0 - 模拟考试:
进入模拟考试模式
场地标定
点击右侧,场地打点,出来飞行器打点的弹窗
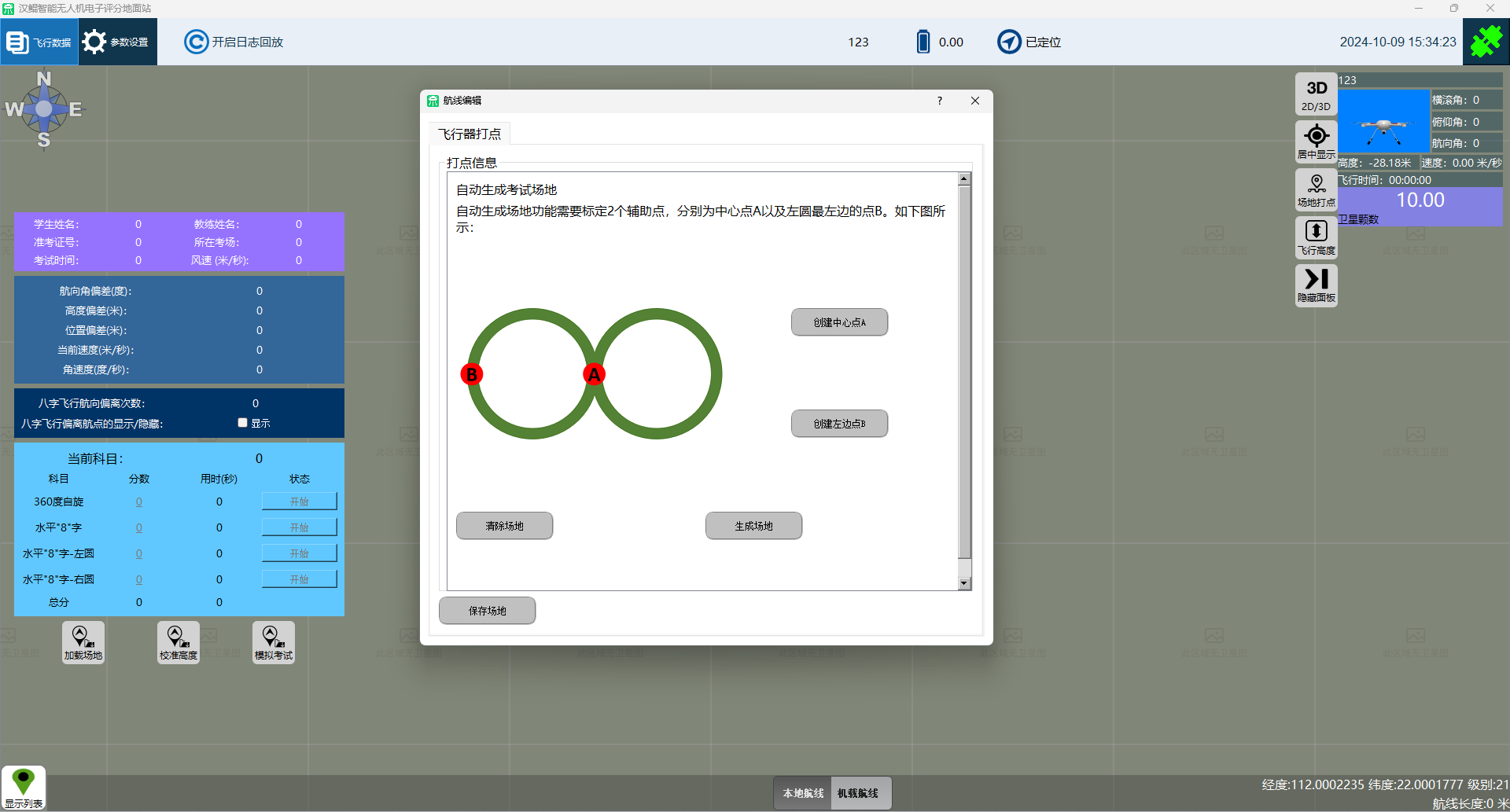
第一步:确认定位状态,右上角必须定位状态为“已定点-定点 RTK”,只有这个状态下执行的打点以及往后的操作,才是正确的,否则全都是错误的,注意会有“已定点-浮点 RTK”这种浑水摸鱼的出现,各位用户要擦亮眼睛,必须是定点 RTK,一字不差,否则定位精度,航向,高度均会错误!!!!
第二步:
将机载端设备放置在中心桶上,点击创建中心点 A
第三步:
将机载端设备放置在最左边桶上,点击创建左边点 B
第四步:
点击生成场地-保存场地
第五步:
保存后,点击左下角加载场地,输入信息后,点击加载场地,机载端在场地附近时,会自动加载场地
高度校准
显示的高度不准确时,可以将飞行器放置于地面,点击下图所示的“校准高度”按钮,即可完成高度校准

训练模式
当场地加载好之后,左侧的训练模式状态会变亮,可以操作

- 点击开始,即可开始各个单项的训练模式,根据语音提示进行飞行
- 过程中如果出现错误,训练模式会提醒但不会打断考生操作,考生仍可以继续飞行,直到完成该项目的训练
- 当完成后点击结束,会出现对应的分数,点击分数,会有分数的细节弹窗
模拟考试模式
点击模拟考试,切换到模拟考试页面
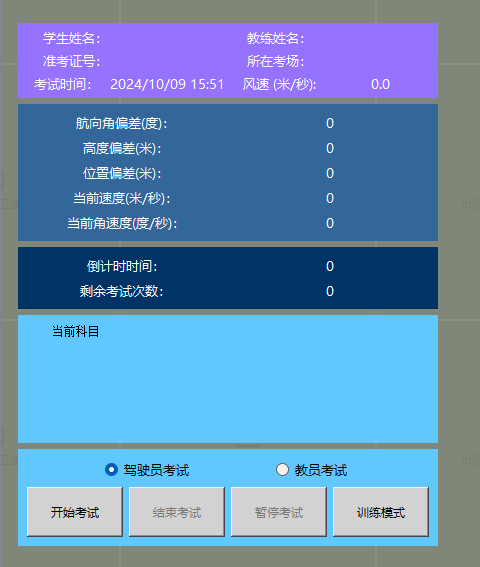
- 可以按需选择驾驶员考试(视距内,超视距),教员考试(教员)
- 点击开始考试,根据语音和左下角的文字提示进行飞行
- 过程中如果有出现错误,模拟考试下左下角会显示错误原因,并且打断考生操作,重新进行考试,考生共有三次模拟考试机会
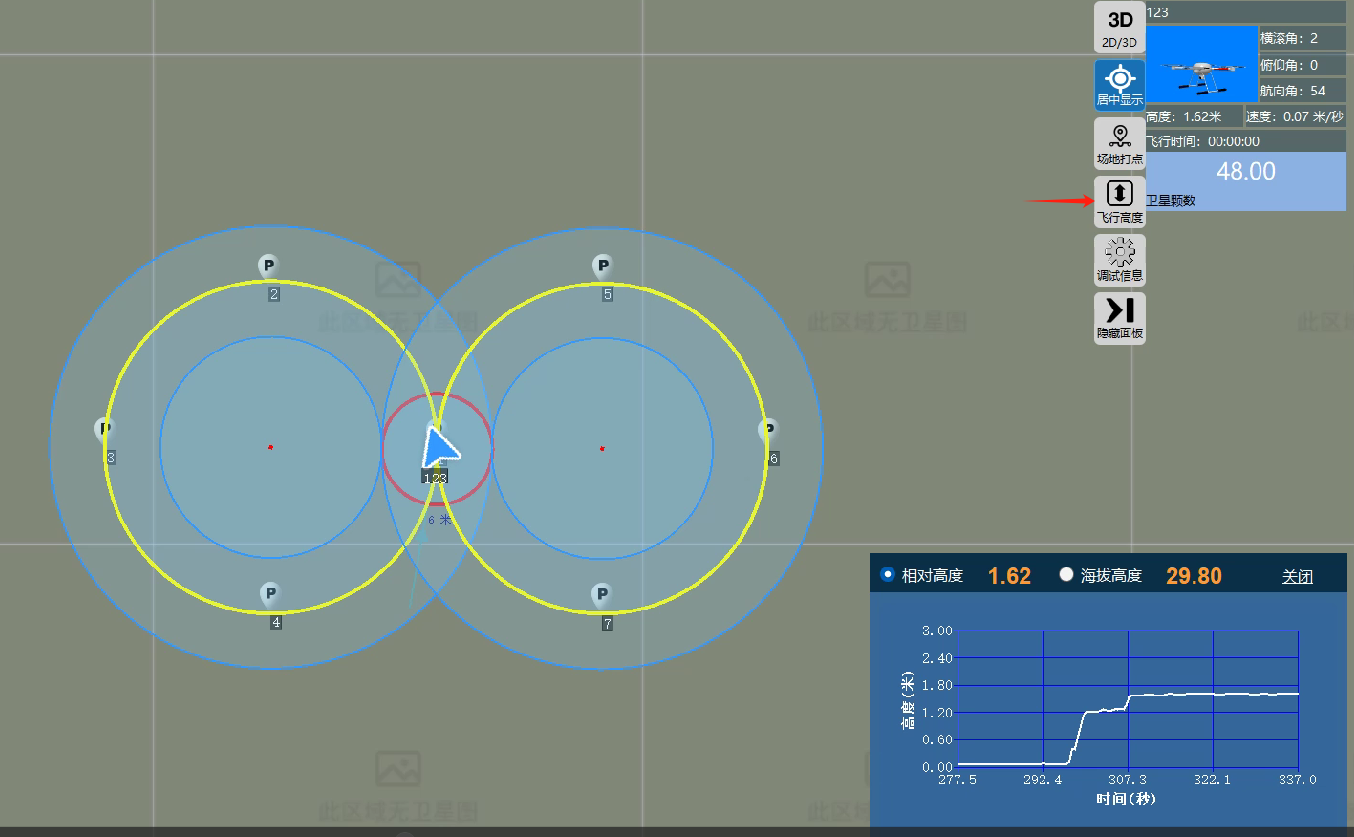
飞行高度功能
开启该功能可以实时查看飞行器的高度变化
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)