超视距地面站使用教程
CAAC 超视距地面站概述
汉鲲 CAAC 超视距地面站是一款适配视距内驾驶员和超视距驾驶员日常训练以及考试使用的地面站
其功能包括考试需求的航线规划,地面站控制飞行器,另外还具有监控飞行器数据,日志文件查看,3D 航线等特色功能
超视距地面站软件对电脑配置的要求
最低配置
- 操作系统:Windows 7/10/11 64位, 不支持老旧系统(如 Windows XP)或 32 位系统。
- CPU: Intel Core i5 4代(或 AMD 等效处理器)及以上,需支持 SSE4.1 指令集。
- 内存: 8GB RAM(若同时运行其他大型程序可能不足)。
- 显卡: 独立显卡:NVIDIA GTX 750 Ti / AMD Radeon R7 260X 及以上。支持 OpenGL 3.3+。需安装最新显卡驱动(避免 OpenGL 兼容性问题)。
- 存储: 固态硬盘(SSD)推荐,至少 10GB 可用空间(用于缓存地图数据)。
- 其他依赖:需安装 Visual C++ Redistributable运行时库。
推荐配置
- 操作系统:Windows 7/10/11 64位
- CPU: Intel Core i7 6代 / AMD Ryzen 5 及以上。
- 内存: 16GB RAM。
- 显卡: NVIDIA GTX 1060 / AMD RX 580 及以上。 显存 4GB+(应对高分辨率纹理和实时渲染)。
- 存储: 固态硬盘(SSD)推荐,至少 10GB 可用空间(用于缓存地图数据)。
- 其他依赖:需安装 Visual C++ Redistributable运行时库。
超视距地面站软件安装
超视距地面站软件下载链接
超视距地面站安装步骤
第一步:解压压缩包

注意:请完全解压出来再使用,不要在解压软件中直接打开文件使用
第二步:找到解压文件里的RGroundControlStation.exe文件,双击打开
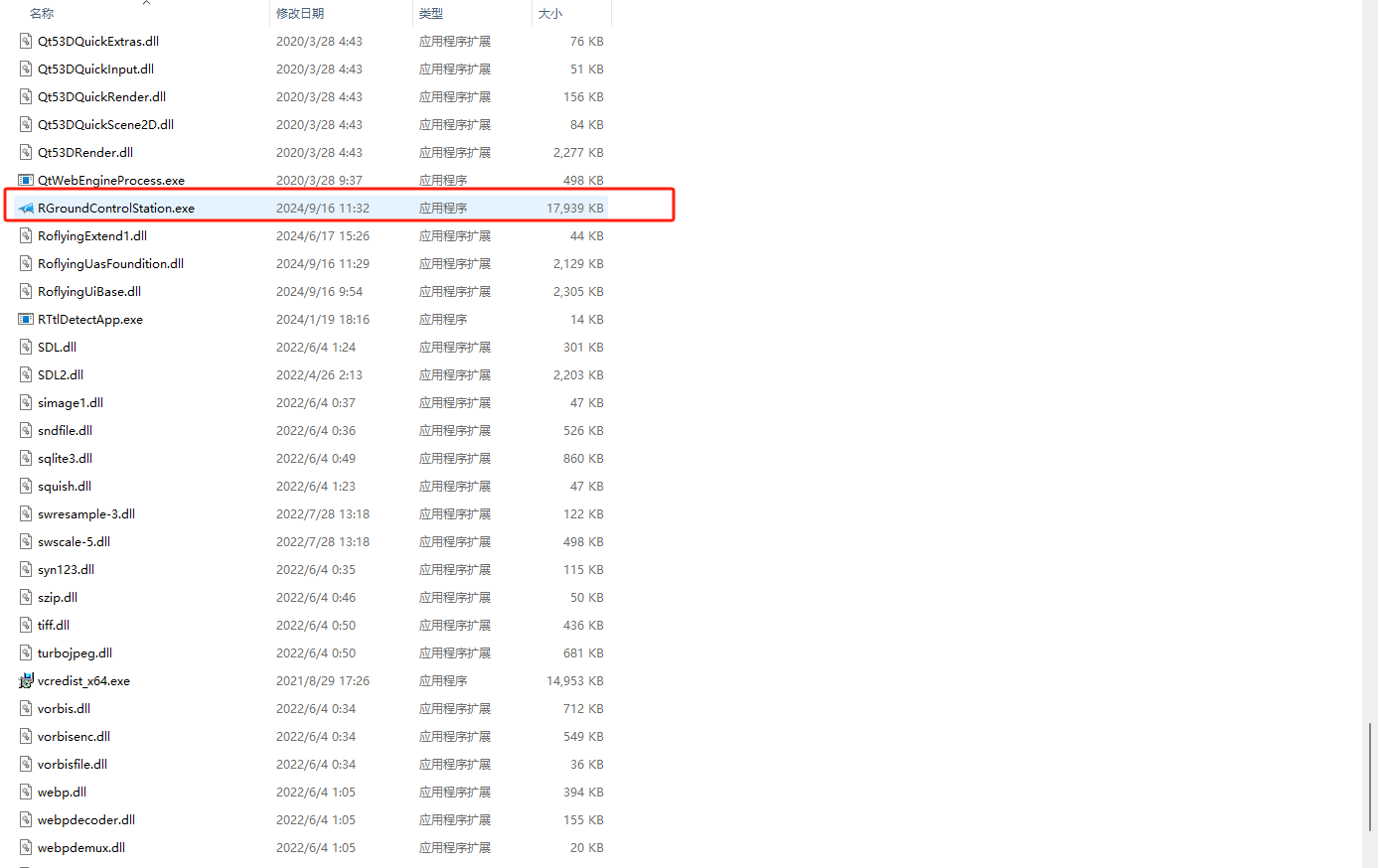
若打开后出现崩溃现象,可以尝试双击允许环境配置软件Vcredist_x64.exe
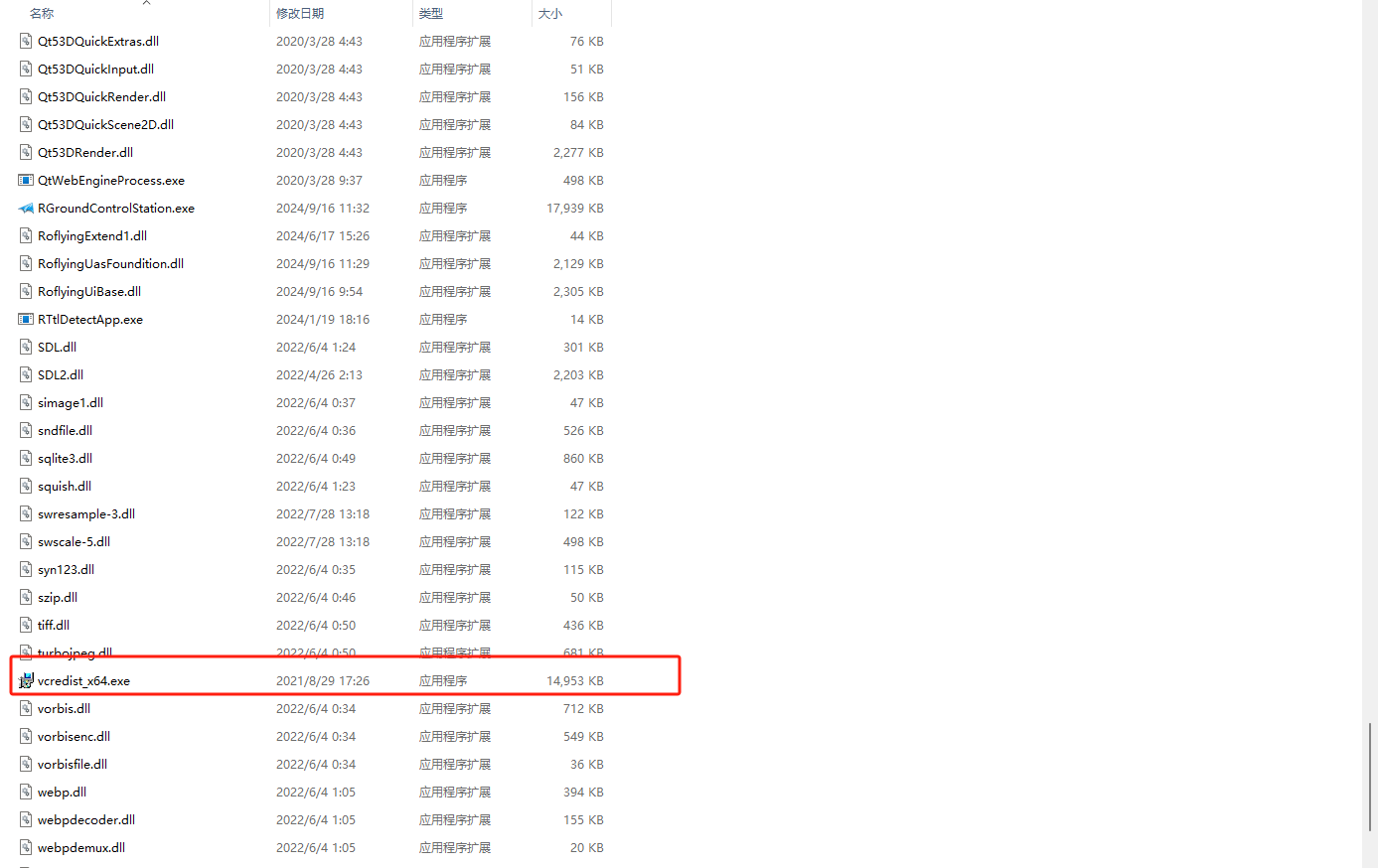
若环境配置文件安装失败,尝试换一台电脑安装软件试试
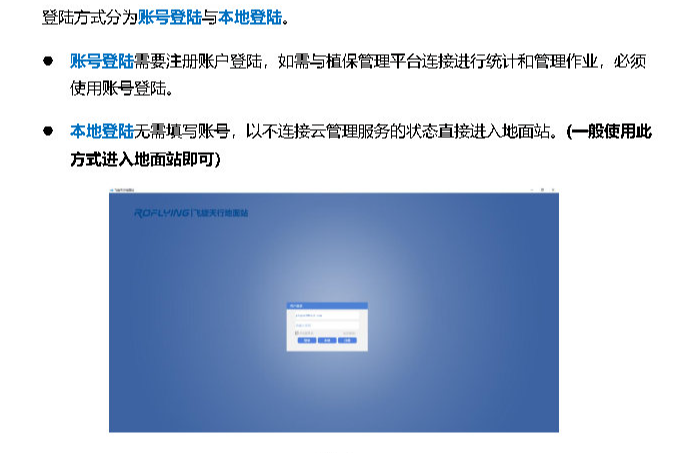
超视距地面站登陆方式
-
账号登陆:账号登陆是需要自行注册的,如果需要使用云平台的话,必须账号登陆,提供给有定制需求的用户使用的,不开放给一般培训用户
-
本地登陆:无需填写账号,不连接云管理平台,直接进入地面站,这是一般培训用户使用的方式
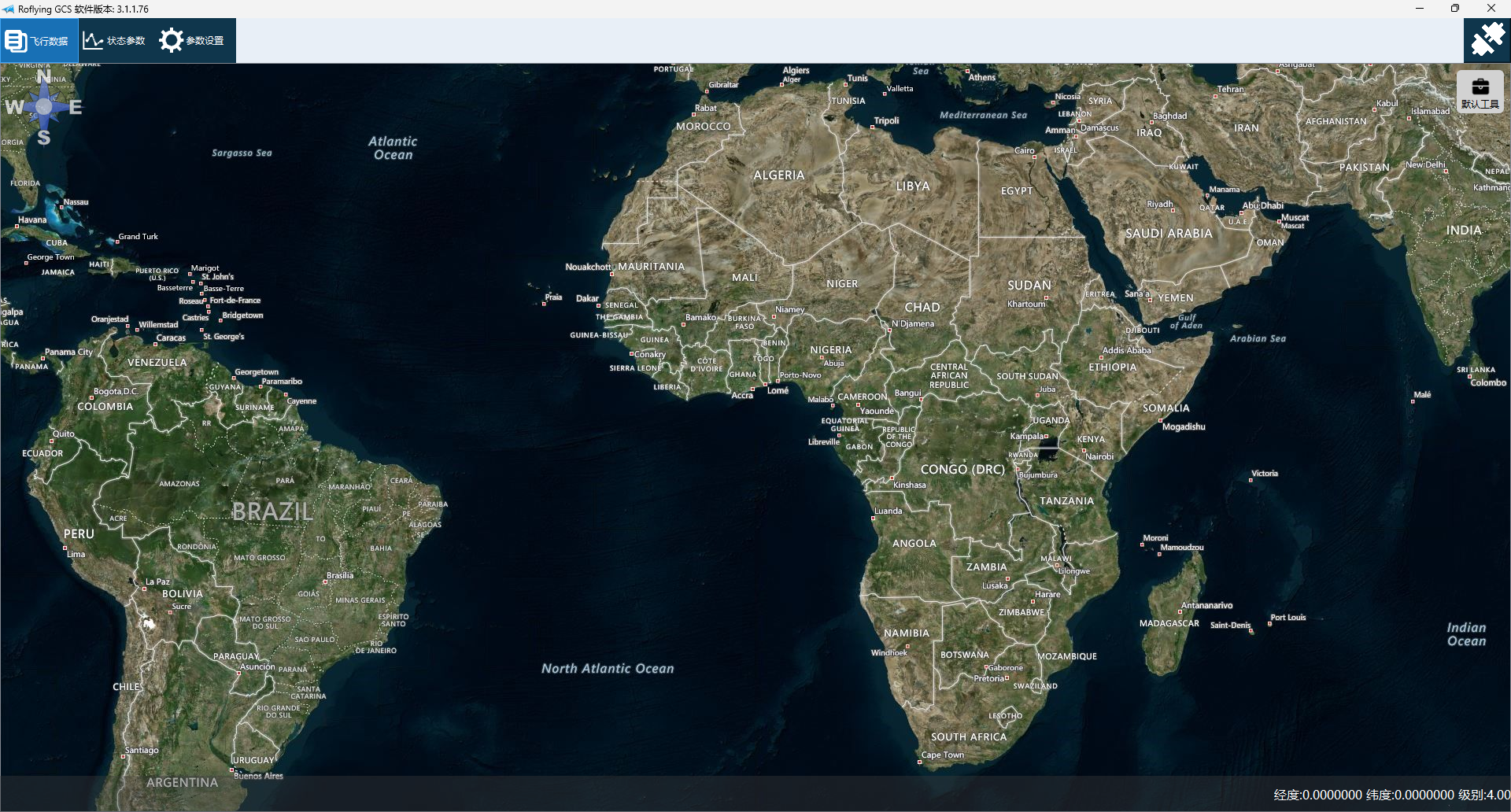
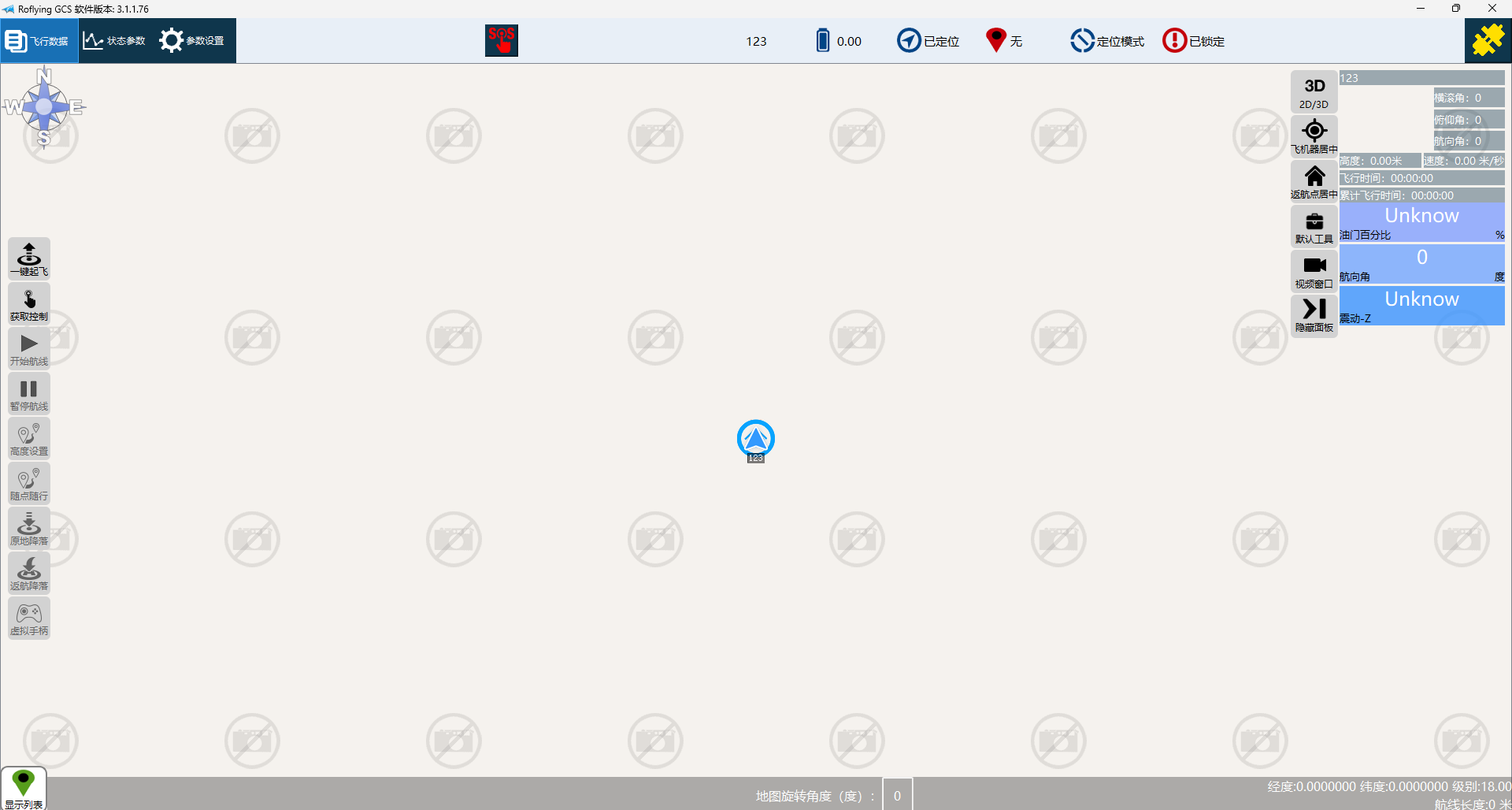
飞行数据页面:
该页面是用于航线规划,地面站控制,以及基本飞行器实时信息的查看的,刚登陆进去是未连接任何设备的状态,因此没有显示这些工具以及信息
状态参数页面:
该页面是用于盲飞考试时候查看飞行器的各项数据的页面,另外还可以切换到实时检测和状态图表栏目,更直观的查看飞行器的实时数据,此外日志查看功能也在这个页面,但此时没有链接任何设备,因此没法下载日志,仅能加载已经下载过的日志文件
连接上飞控之后:
状态参数页面会变成以下情况
参数设置页面:
该页面提供给客户一些链接飞控前的设置
常规设置
- 语言设置:
设置中英文,喜欢飞飞行器的途中学一手英文的客户可以切换成英文 - 地图设置:
喜欢卫星地图的设置成微软混合,
喜欢电子地图的设置成高德地图,
喜欢谷歌地图的对不起,谷歌不喜欢你(谷歌已禁用中国区服务)
基准纬度可以设置为用户当前位置的纬度 - 航线样式,航点样式:
顾名思义,喜欢什么颜色选什么颜色 - 航点编号:
选择 0 或者 1 后,对应的航线编辑后的航点会从 0 或 1 开始算

选完自己心爱的设置后记得保存
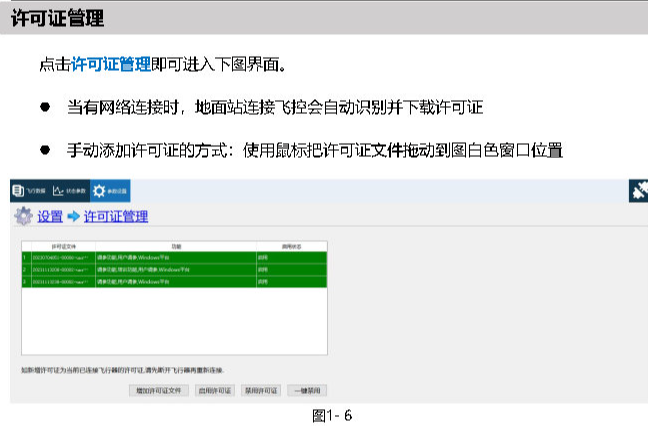
许可证管理
每一个设备都对应一个许可证,在连接地面站之前,要先检查是否有获取到许可证
许可证获取有两种方式:
- 使用最新版本的汉鲲超视距地面站,注意是最新版本的,未更新的需要去官网更新,保持联网状态,连接设备的时候会自动获取许可证
- 特殊情况下,工程师会根据情况给用户发许可证,用户需要在许可证管理页面下增加该许可证文件后方可连接设备
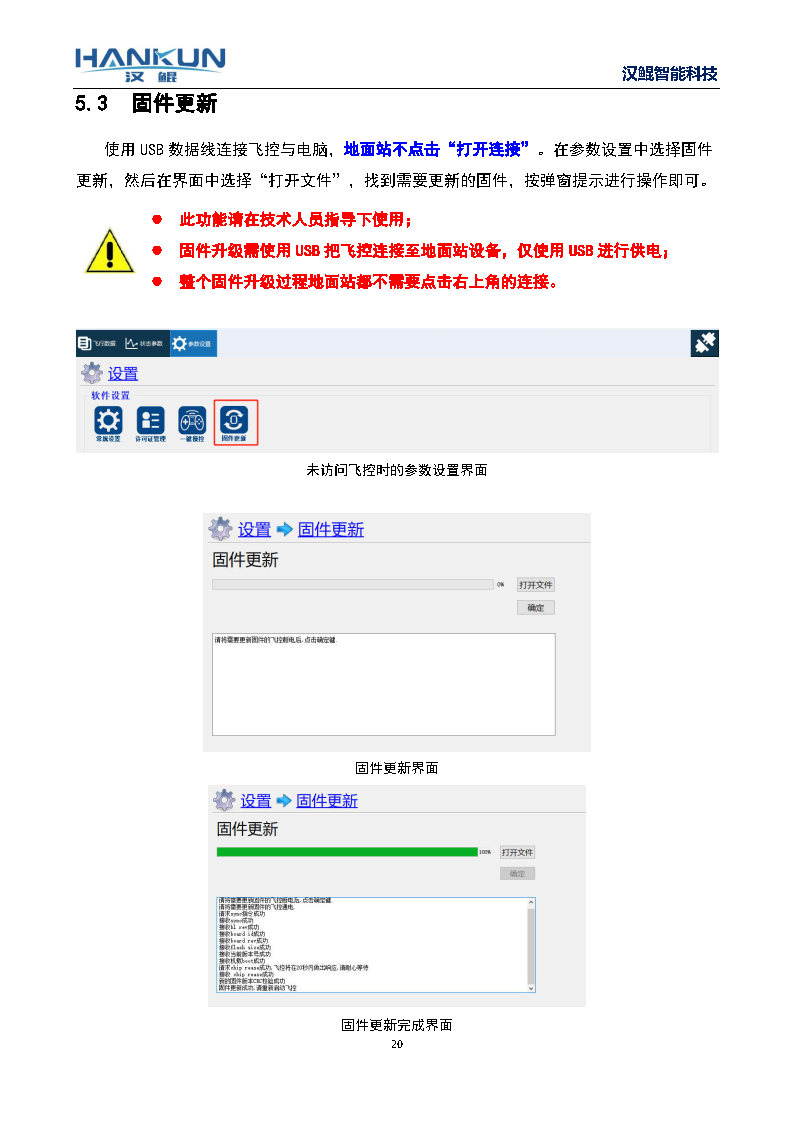
固件更新
- 打开地面站 使用 USB 给飞控供电 但无需连接上地面站
- 参数设置-固件更新
- 打开文件-打开后缀名为.rof 的文件
- 飞控断电(拔掉电脑端 USB 口)地面站上点击确定
- 飞控上电 静待绿条加载完毕 提示更新成功
- 若提示固件版本一致 说明该飞控已经烧录同款固件 无需再次烧录
下方固件更新图示
固件更新的教学视频连接:
下方是固件更新的视频
[固件更新](【飞控健康与自我检测:固件更新与配置更新】 https://www.bilibili.com/video/BV1xA411Z7vc/?share_source=copy_web&vd_source=3294eedac1cf618d2dbda88d67edf41b)
超视距地面站链接
飞控与地面站的连接方式:
1.飞控或数传的 USB 接口进行的有线连接 2.蓝牙配对进行的无线连接
有线连接
连接前准备
-
USB 连接:将 USB 一端接上飞控,另一端接上电脑
使用 type-c 数据线的,接飞控侧边的 Type-c 口,使用 Mirco-usb 数据线的,接 LED 灯上的 usb 口 -
915 数传连接:将飞行器用电池供电,确保飞控开机,另一支 915 数传使用 USB 接上电脑端
此时查看飞行器上的 915 数传的灯是否是常亮且接线是否正确
若灯是闪烁的,证明没有对频,需要将数传重新对频
若飞机端的数传接线口不是 TELEM1,请接到正确的接口
下载驱动
下方为飞控驱动以及数传驱动的下载链接
飞控驱动
数传电台驱动
无线连接
连接前准备
- 将遥控器主控打开,分辨是否是主控的方法为:主控后边贴有飞控编号的贴纸 飞行器上电后,拨动模式杆,飞行器的 LED 灯会有颜色变化
- 飞行器上电,查看接收机上的灯是否为绿灯常亮,若是红灯闪烁则没有对频,需要先对频,另外检查接收机上是否接好了一根彩色的线材,另一端接到飞控的 TELEM1 口
- 打开电脑的蓝牙,搜索 SIYI 开头的蓝牙并连接,配对码为 1234,有时候连不上,重启一下遥控器
关于有线连接和无线连接中,确认正确的串口号的小妙招
有线连接
- 打开电脑的设备管理器
- 选择串口列表
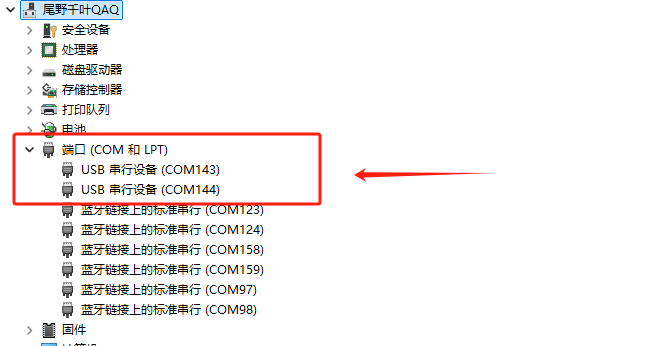
- USB 直连飞控的情况下,会显示“USB 串行设备(comxxx)”这里的 comxxx 就是串口号,但是可能需要两个都尝试一下
下方为 USB 连接地面站确认端口号方法图示
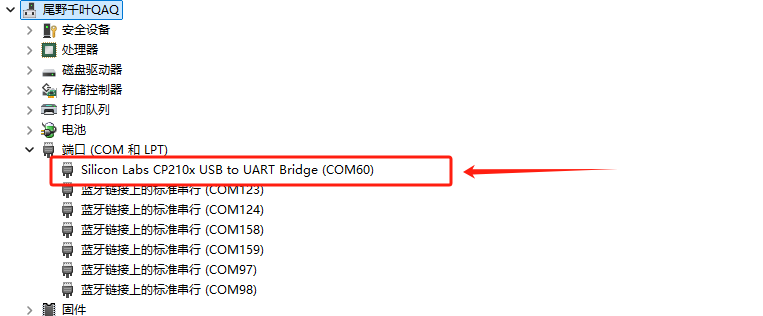
数传连接的时候,会显示“CP210XUSB to UART Bridge(comxxx)这里的 comxxx 就是串口号
下方为数传连接地面站确认端口号方法图示
无线连接
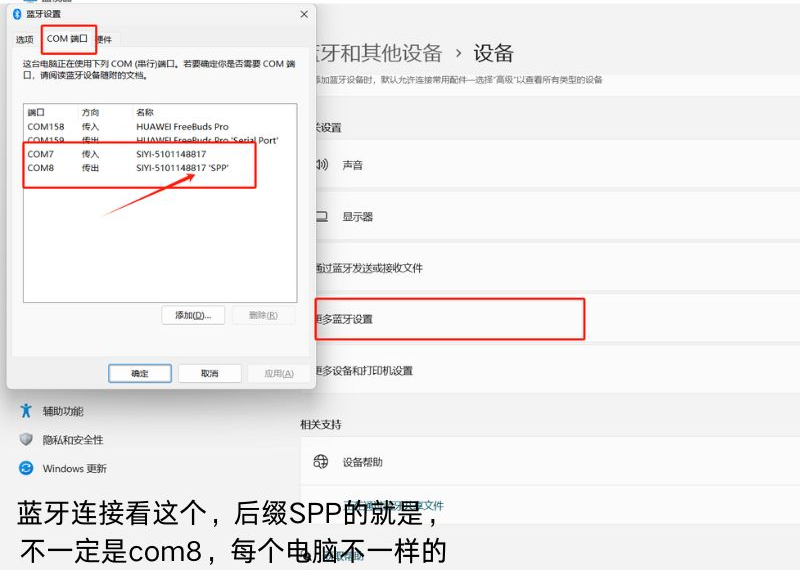
连接上主控蓝牙之后,拖动到电脑蓝牙页面最下方,找到“更多蓝牙设置”
点进去后选择上方“com 口”
会看到下方显示“comx 传出 SIYI-XXXXXXXX"SPP"”,注意有这个 spp 的就是正确的 com 口号
下方为蓝牙连接确认端口号图示
正式开始连接地面站
- 地面站点本地登陆,不要注册账号
- 保证地面站是最新版本,新老用户请移步至官方网址:
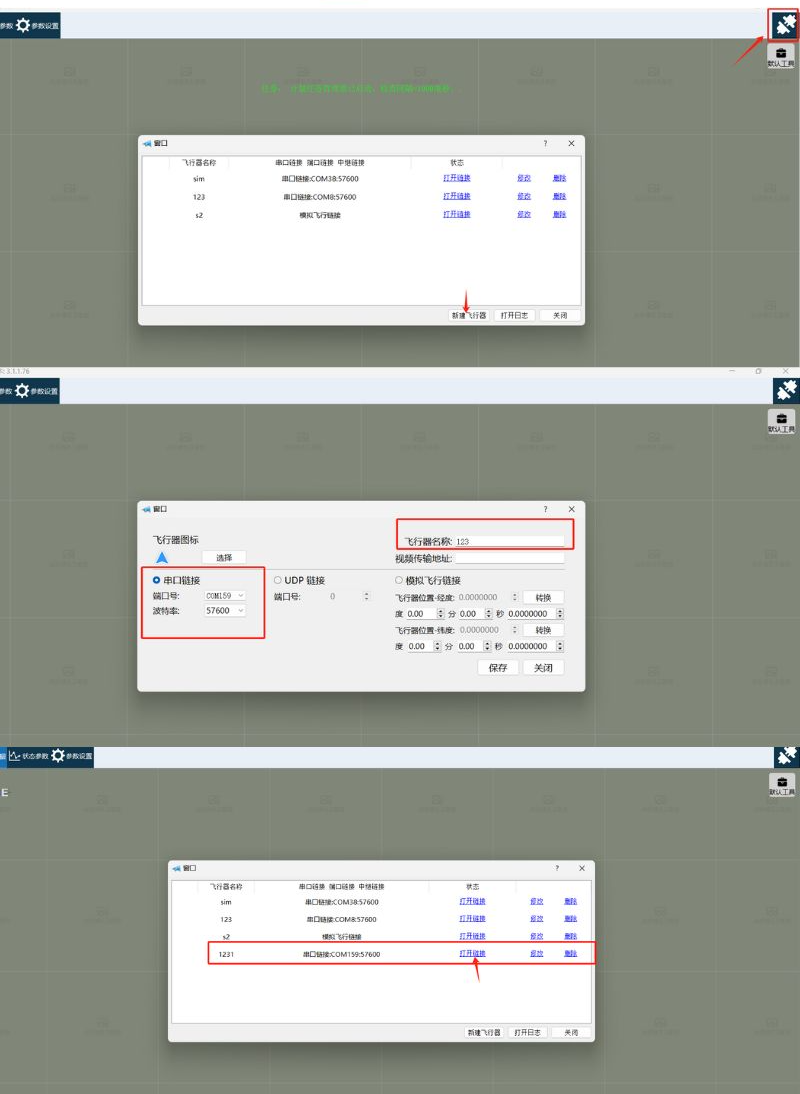
- 保证电脑处于联网状态,打开地面站后,点击右上角的连接按钮
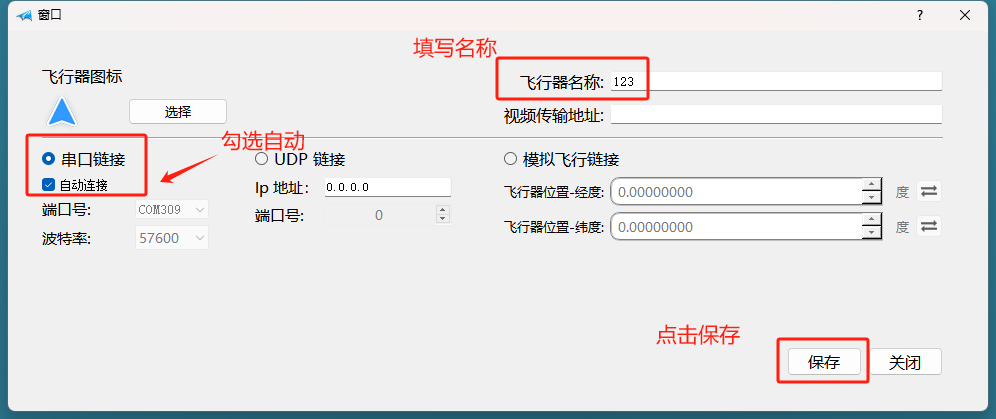
- 新建飞行器连接,输入飞行器的名字,左侧选择串口连接
- 下拉 com 口的列表,选择通过小妙招获取的正确的 com 口号,波特率选择 57600,保存
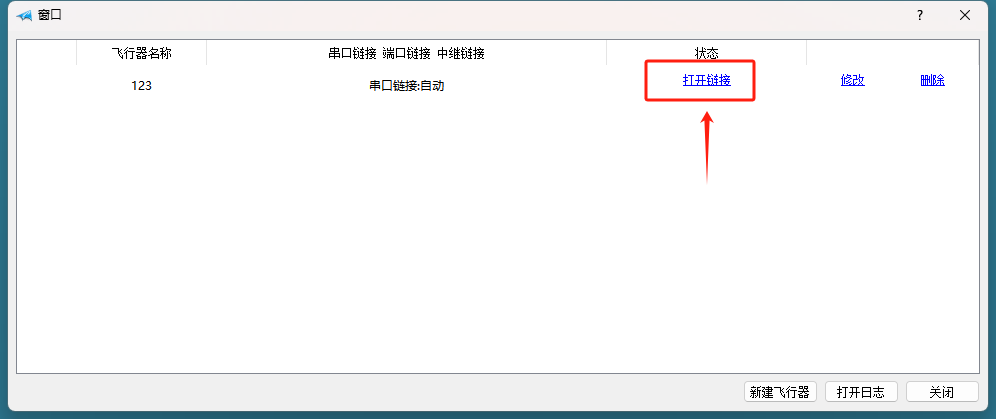
- 点击右侧,打开链接,喝口茶静静的等待读条
下方为连接地面站图示 3
模拟链接
汉鲲超视距地面站提供模拟仿真连接的功能,具体操作如下
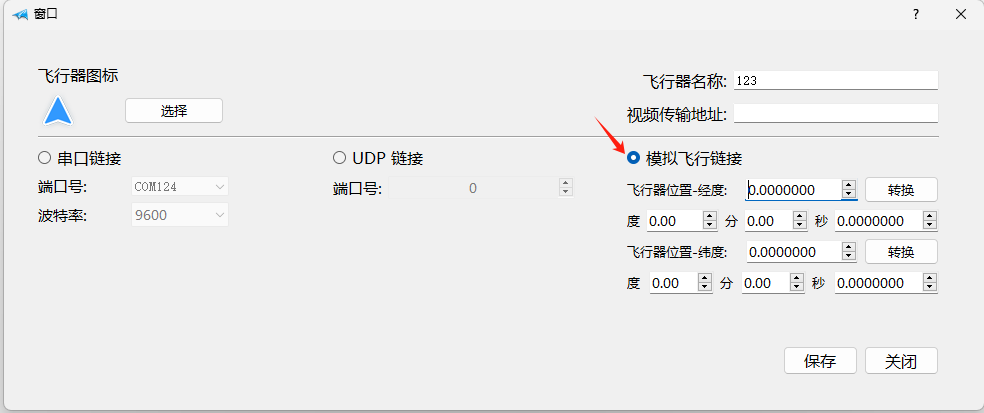
连接时,选择模拟飞行链接,可以输入自己所在地区的经纬度,进去之后飞行器图标会锁定到该经纬度所在位置
链接上模拟链接后,各项操作与实际均相似
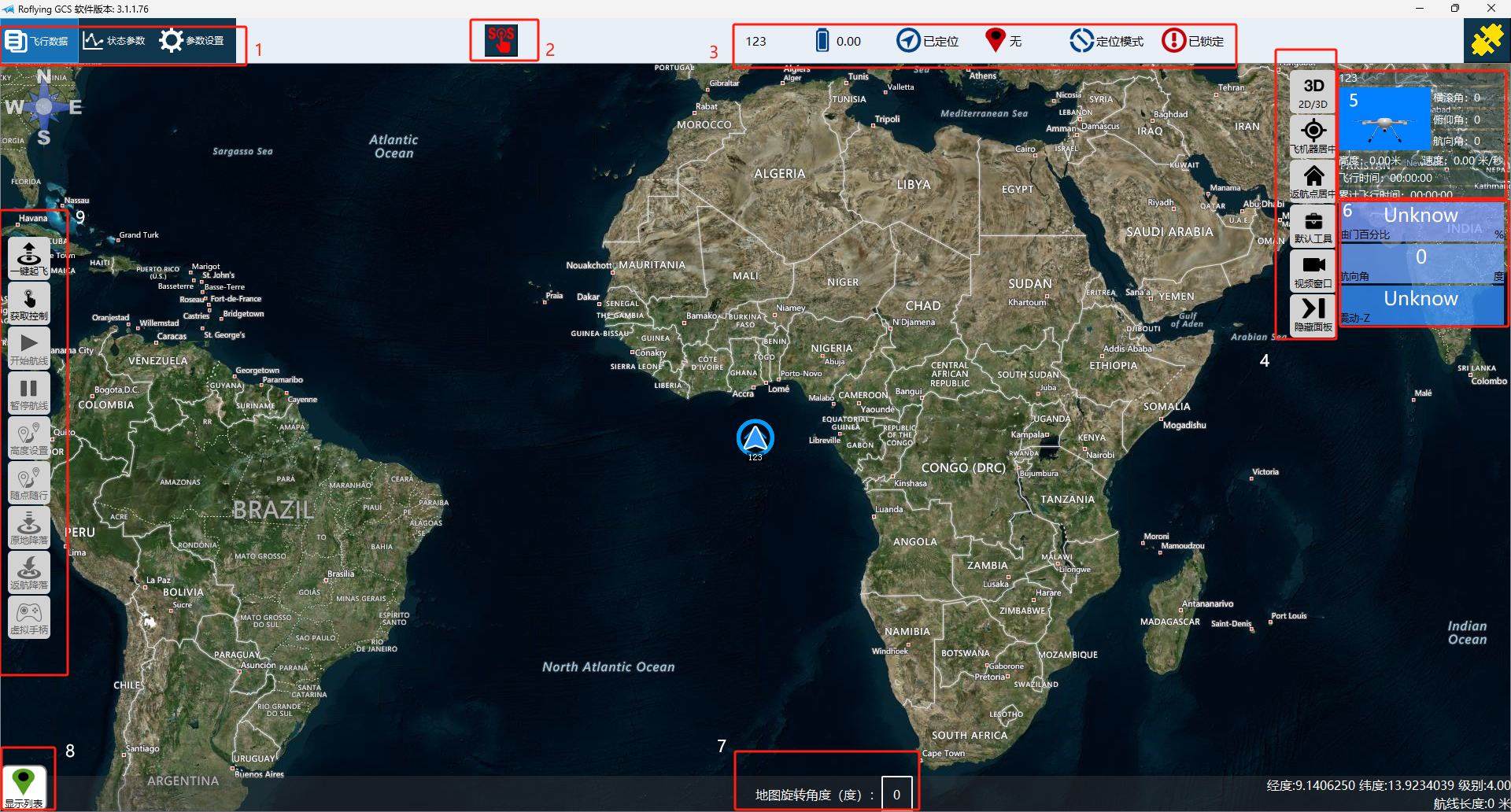
飞行数据详细介绍(已连接上飞控)
- 界面切换栏:可以在飞行数据界面,状态参数界面,参数设置界面之间切换
- SOS 紧急加锁按钮:当出现危险情况,遥控器无法加锁停下桨叶时,可以使用该功能紧急停转电机
- 飞行器状态栏,从左到右分别是:飞行器名称;实时电压;GPS传感器定位状态;航点信息;飞行器当前飞行模式;解锁/加锁状态
- 工具栏:包含航线规划等工具
飞行器模型:一个实时可视化飞行器姿态的模型,点击该模型可切换至罗盘视图
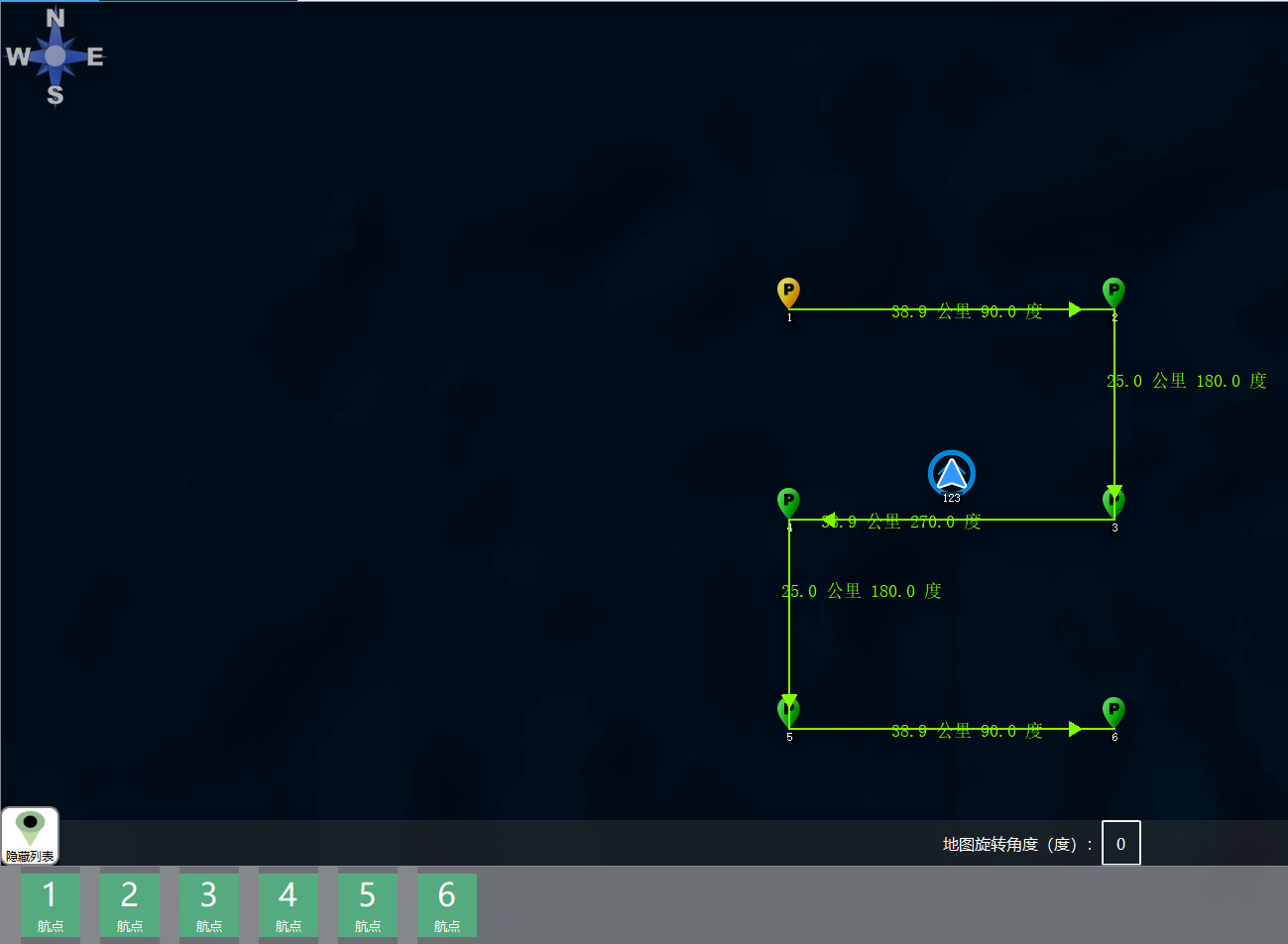
自定义信息栏:点开该栏目后,可以自由选择想看的信息,最多只有三个栏位 - 地图旋转功能:输入角度旋转地图,天旋地转
- 航点顺序编辑栏:点击显示列表后,会将各个航点按顺序一一显示,通过拖动航点可以改变航点的顺序
- 一键操作栏:地面站控制飞行器完成一系列的动作
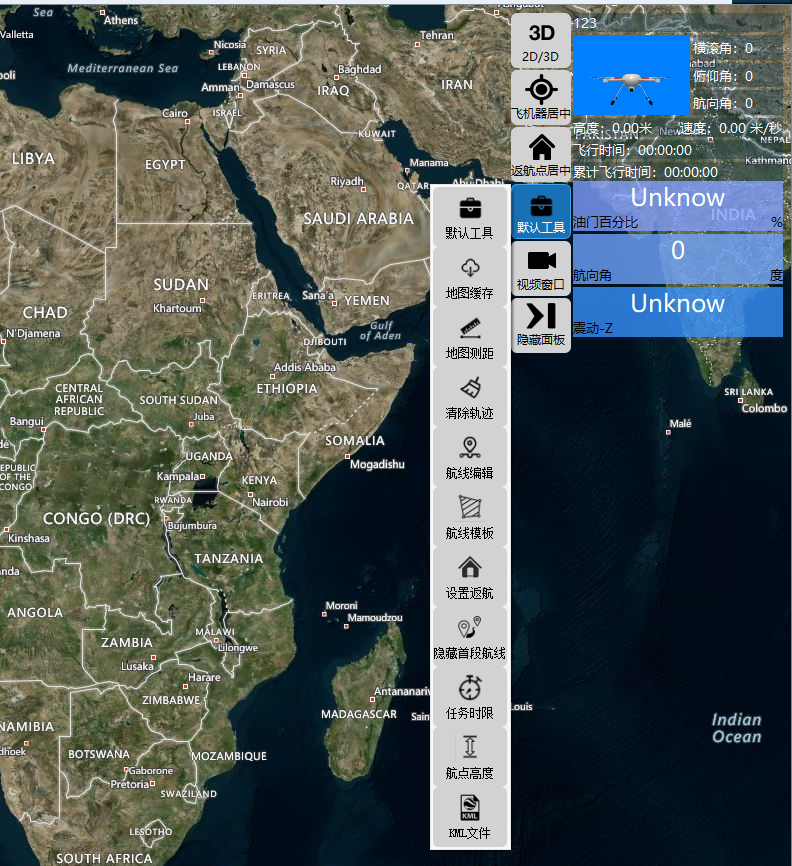
工具栏详细介绍
- 飞行器居中:将飞行器图标镜头固定在屏幕中央
- 2D/3D 航线:切换至 3D/2D 航线,默认是 2D 航线
- 返航点居中:将返航点图标镜头固定在屏幕中央
- 视频窗口: 看特定云台的视频,不一定都能看,需要联系工程师确认
- 隐藏面版:不想看到工具栏就点这个
默认工具栏
-
地图缓存:将地图下载下来,离线的时候可以用
-
地图测距:任意在地图上点两点,测定两点之间的直线距离
-
清除轨迹:清除地图上的飞行轨迹
-
隐藏首段航线:将首航点的航线隐藏不看
-
任务时限:规定任务的时限,开始倒计时
-
航点高度:线性图的方式看到航点高度的变化,更加立体
-
KML 文件:支持导入 KML 格式的地形数据文件
航线编辑工具
点击航线编辑工具会跳出航线编辑的窗口,当航线编辑的窗口存在时,可以使用鼠标双击地图上的任意位置创建航点,并可以使用鼠标左键长按航点进行拖动位置
1,统一设置:
统一设置意味着该页面的所有设置选项均针对所有航点,修改完成后,点击保存修改,再上传航线,删除航点后,也需要保存修改并上传航线才能起效
-
航线高度、飞行速度、上升下降速度
-
航向:勾选后,飞行器在飞向航点的同时,机头会自动调整至朝向此航点
-
悬停时间与转弯方式设置
-
闭合航线设置有以下选项
循环航线:勾选后飞行器会执行循环操作
闭合航线:地面站会显示航线的闭合 -
航线反转:勾选后航点顺序会与原航线相反
-
航线移动:勾选后可以使用鼠标整体移动航线(鼠标放在任意航点上拖动)
-
旋转航线:按设置值顺逆时针整体旋转航线
-
上传航线(把本地航点上传至飞行器);删除所有航点;保存修改(修改本地航点的参数)
提示 1:当设置闭合航线时,飞行器在执行完最后一个航点时会返回航点 1 重新继续执行航线,直至切出自驾模式才会停止航线飞行。
提示 2:当需要删除机载航线时,需要把本地航线删除,然后把空的航线上传,即可删除飞行器上的机载航线。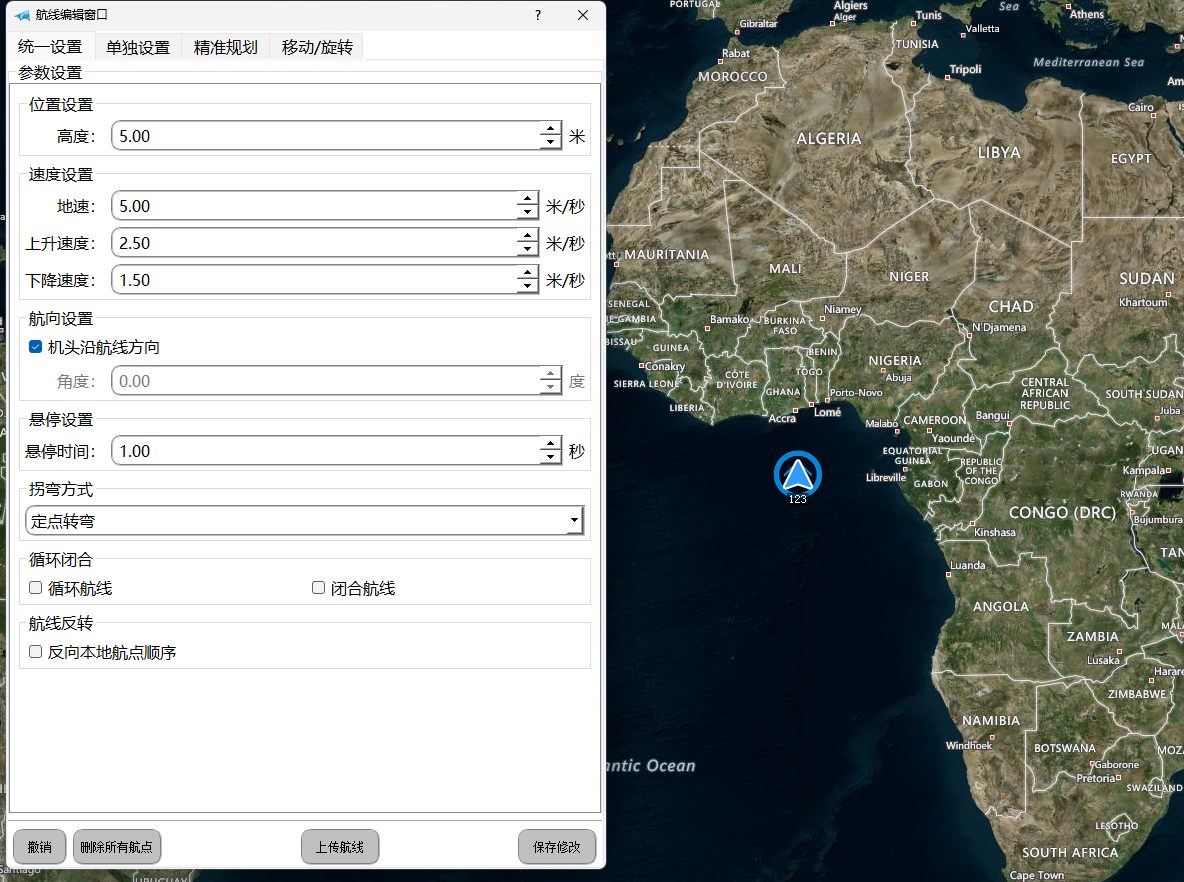
2.单独设置:
单独设置意味着该页面所有设置仅针对上方航点列表中选定的航点,修改完成后,点击保存修改,再上传航线,删除航点后也需要保存修改并上传航线才能起效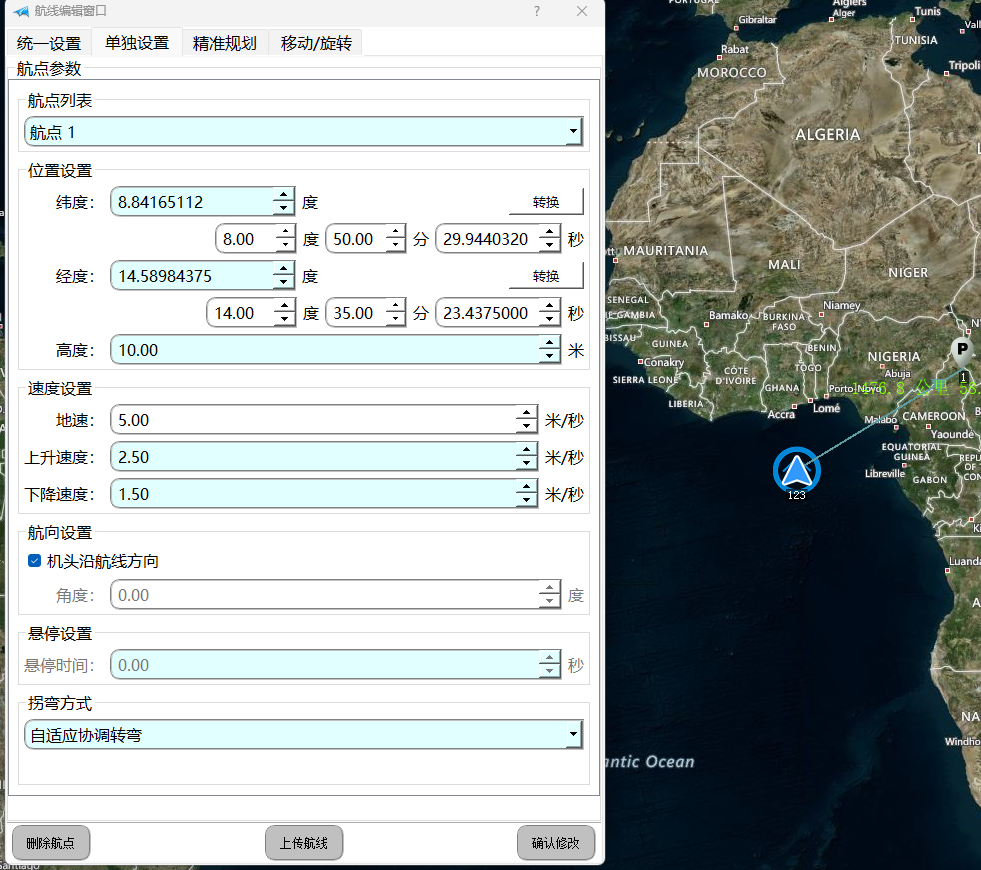
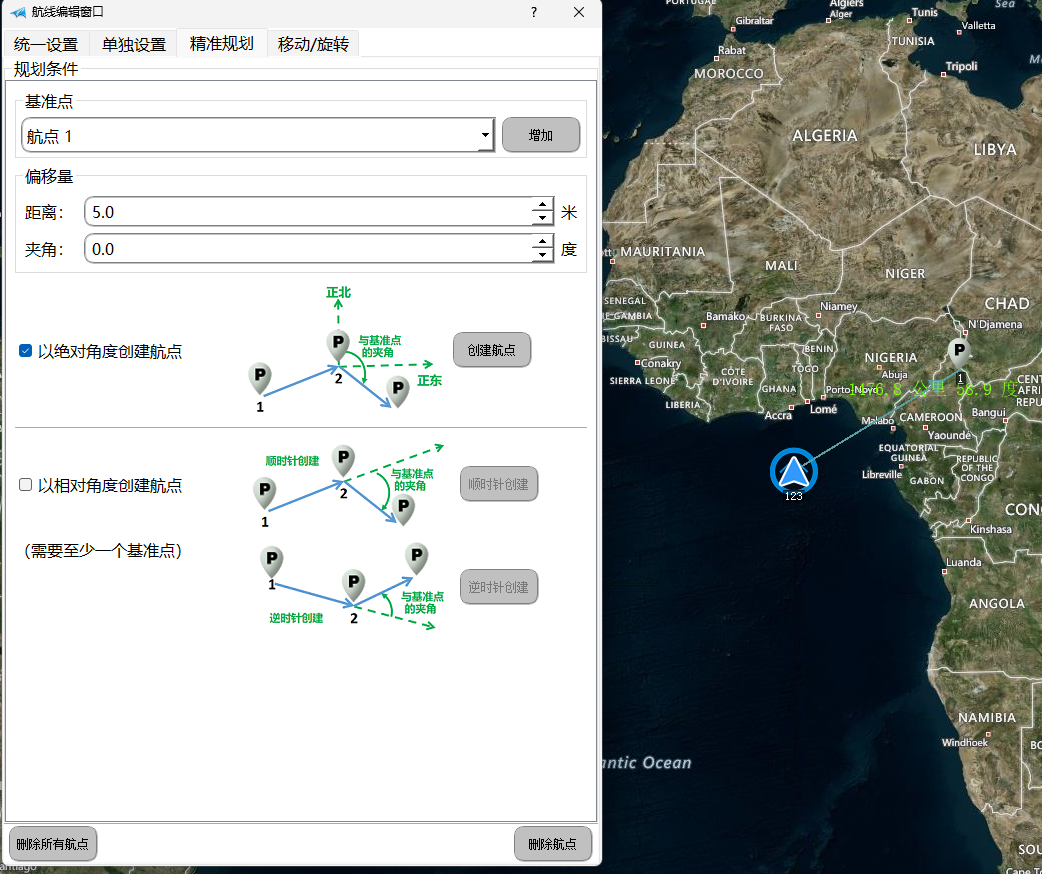
3.精准规划:
精准规划意味着可以通过设定前后两个航点的精确距离和精确角度来创建航点,该功能首先要创建一个基准点,当生成目标航点后,基准点会变成已经生成的目标航点
-
绝对角度:绝对角度是指相对于某一个固定参考方向的角度,通常用来描述一个物体或系统的方向。这个参考方向一般是北方(在地理和航海中常用)、某一标准平面或其他固定的基准线。
-
相对角度:相对角度是指一个物体或系统相对于另一个物体或基准参考方向的角度。这种角度的定义依赖于相对的参考系,因此可能会随着参考物体的变化而变化
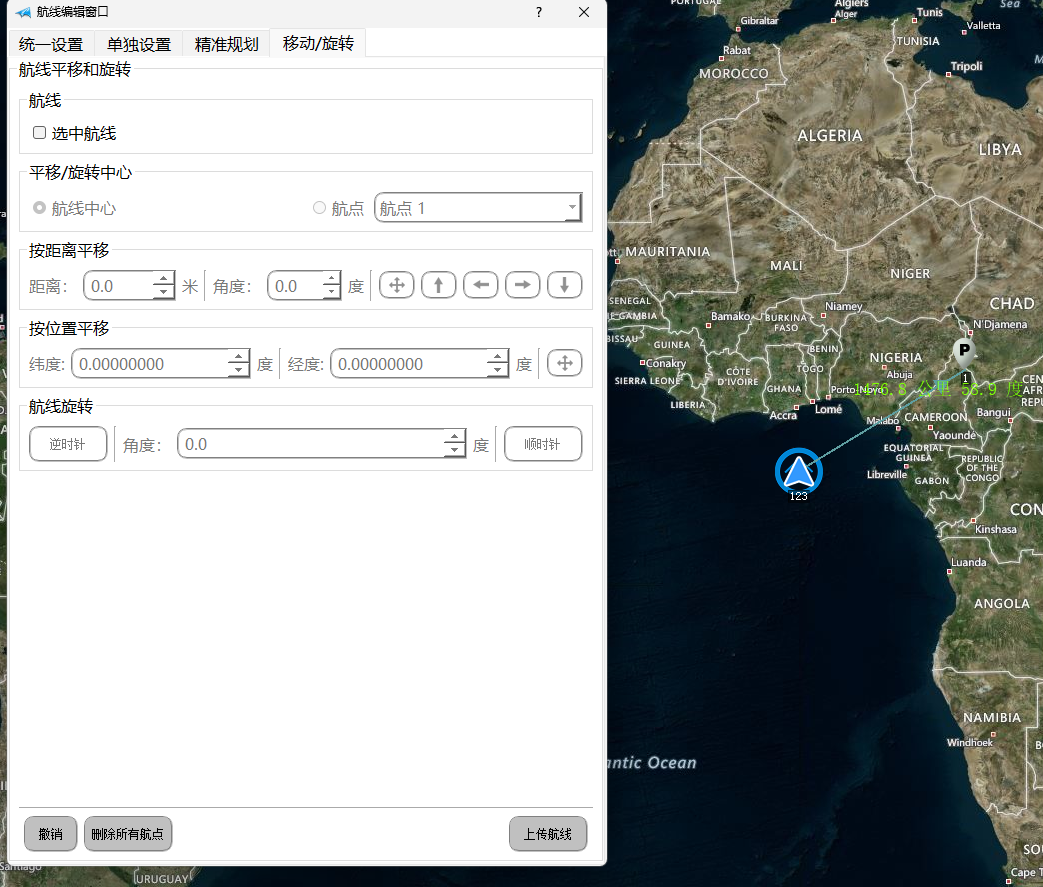
4.移动/旋转
该页面提供给用户将已规划好的航线整体平移或者旋转的功能
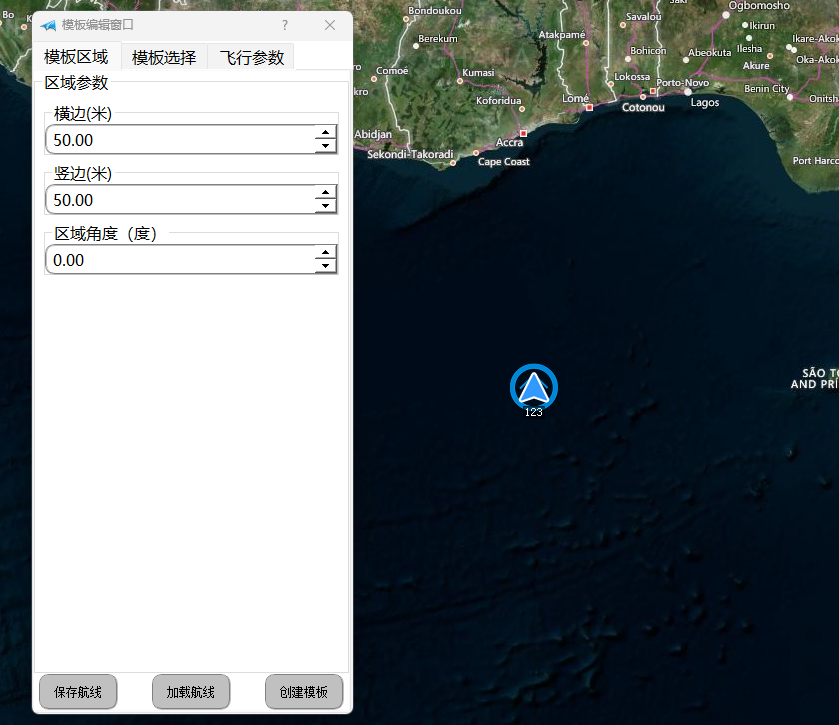
航线模板工具
1.模板区域:
设定模板的规划边界和角度
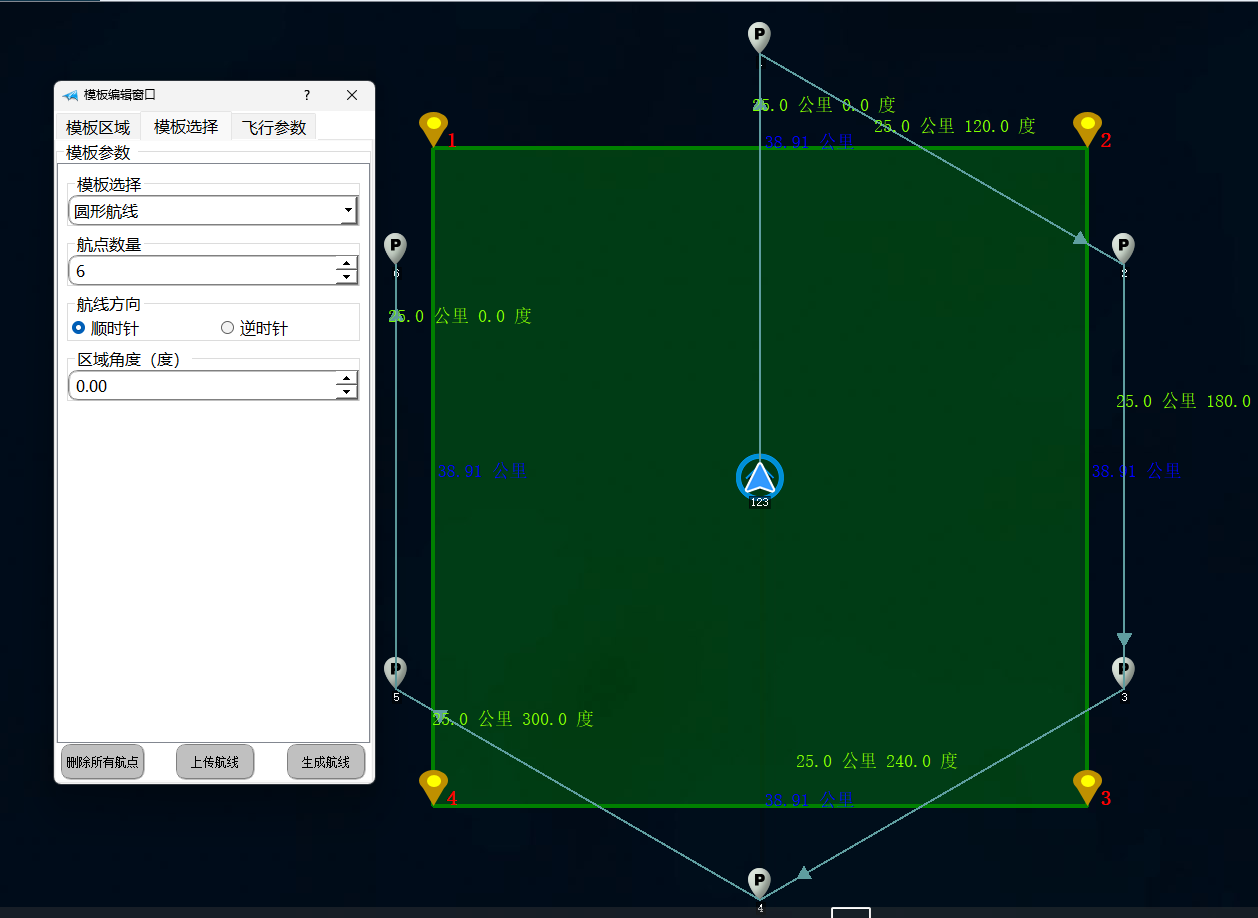
2.模板选择:
选择需要用的模板和模板基本的设定
圆形航线模板:
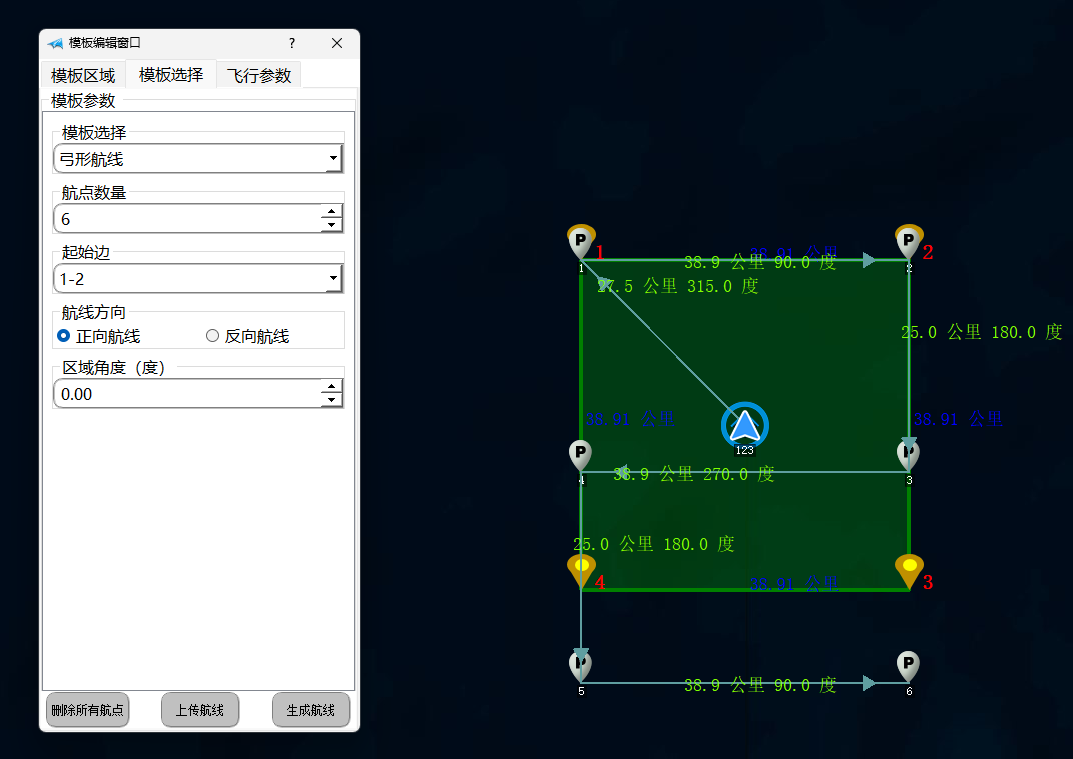
弓形航线模板:
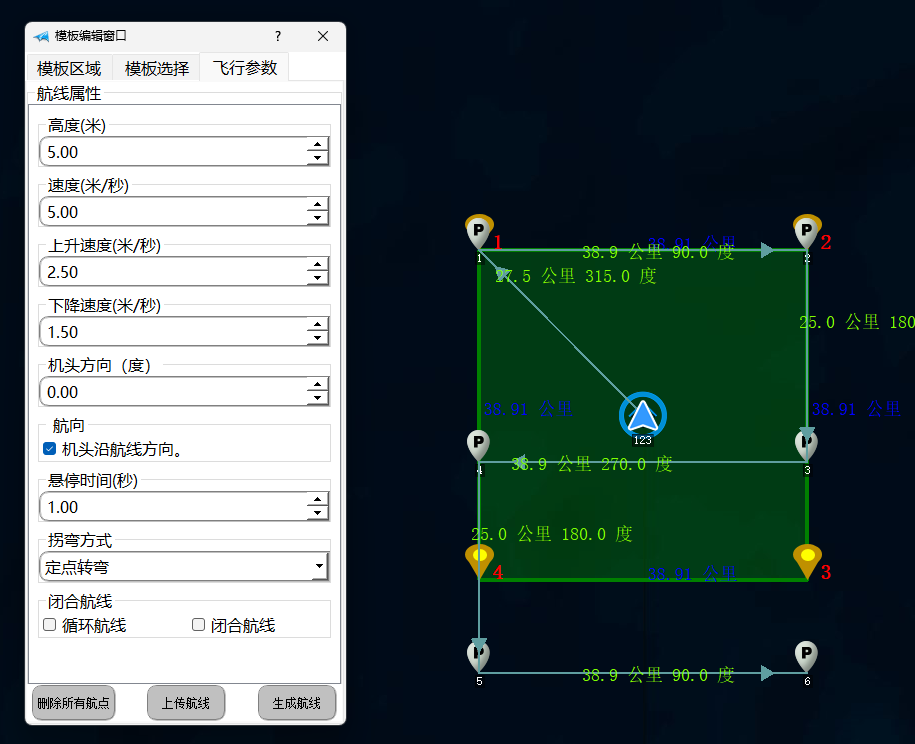
3.飞行参数
设置基本的航线航点属性
4.航线信息确认框
当航线规划好之后,点击上传航线,会出现航点信息的确认框,可以进一步确认航线规划的准确性与安全性

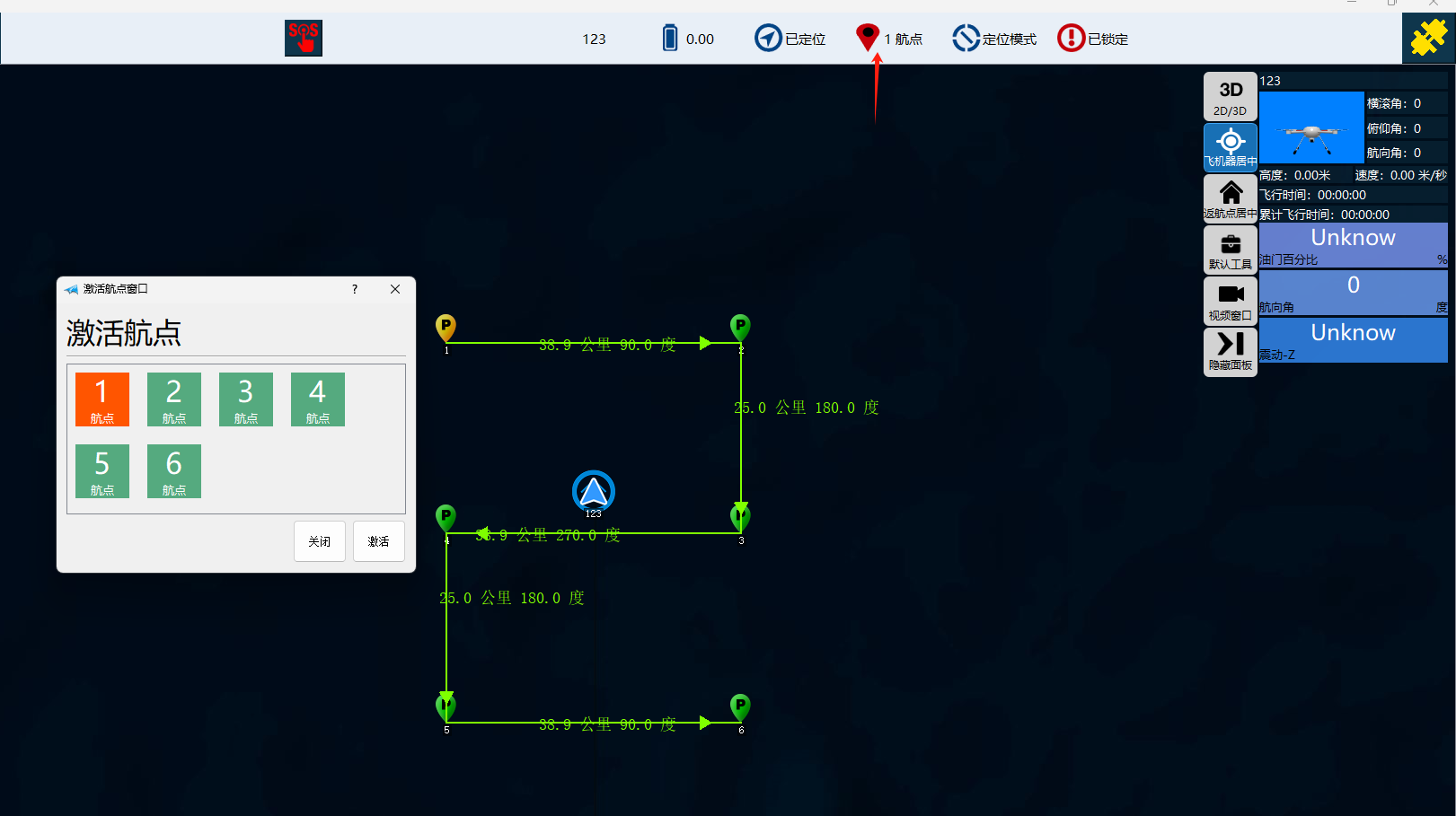
5.激活航点
点击上方飞行器状态信息栏中的航点信息栏,会有一个激活航点窗口,点击上方的被跟踪航点后弹出激活航点的窗口,然后选择需要的航点为例),点击激活即可。航点激活后,飞行器将从被激活的航点开始自驾。
6.航点顺序
左下角选择航点列表,可以拖动任意航点调换顺序,完成航点顺序修改后,需要重新上传航线才能成功修改
一键操控栏介绍
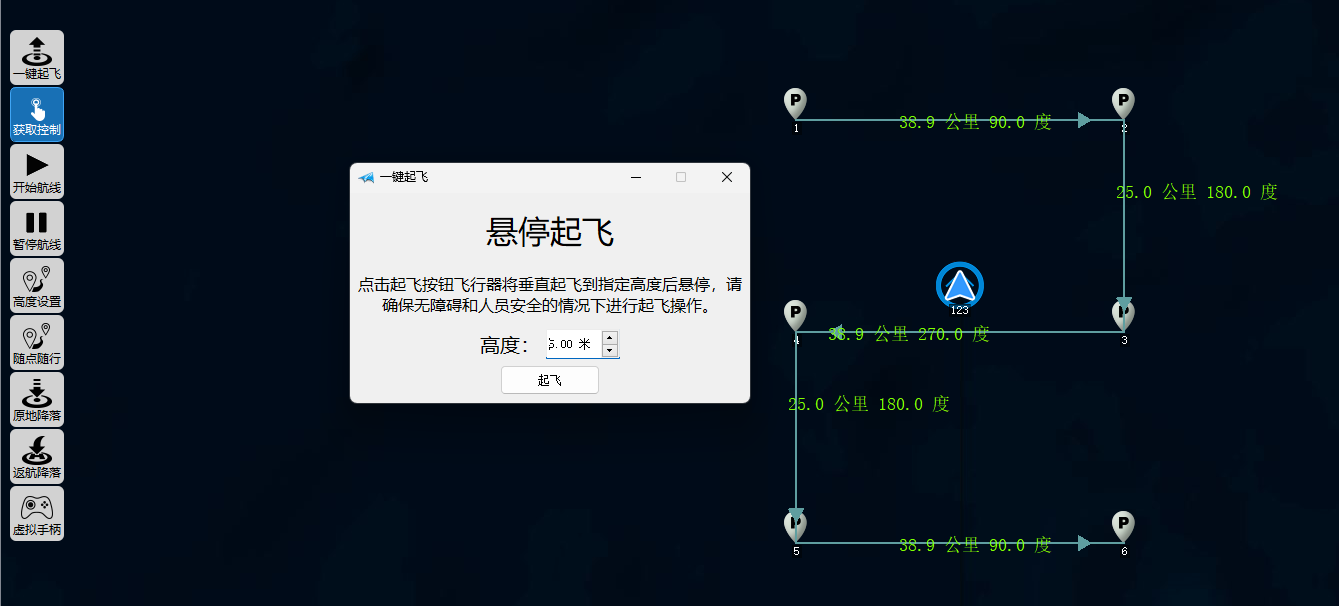
1.一键起飞:
点击后飞行器会自动解锁起飞到指定高度(默认 5m),
解锁前需要保证
- 飞行模式为定位模式且绿灯单闪没有黄灯夹杂(没有警报)
- 遥控器的杆位均在中位不动 3.需要注意的是,地面站的一键起飞弹窗有时候会闪到后台去,如果发现点击一键起飞没有弹窗,可以看看是不是到电脑后台被软件挡住了
2.获取控制
获取控制需要先进行一键起飞,或者手动起飞,点击获取控制后,下方的按钮均会变亮,意味着此时可以通过下方的按钮控制飞行器的操作。
3.开始航线
点击开始航线后,飞行器会进入自动驾驶模式,并且开始走已经上传的航线,如果点击开始没有反应,请看看飞行器是否已经起飞
4.暂停航线
点击暂停航线后,飞行器会终止执行航线飞行,并进入随点随行状态
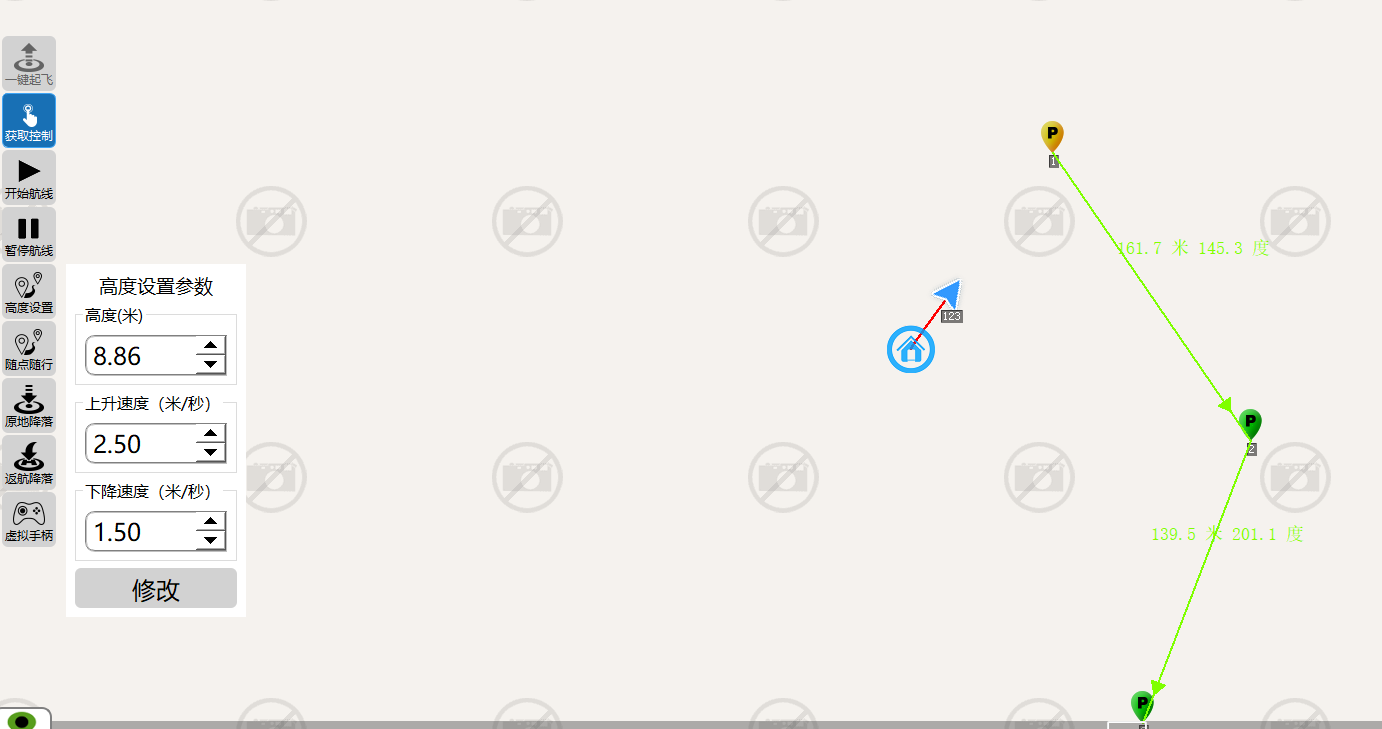
5.高度设置
点击高度设置后,飞行器会终止执行航线,进入随点随行状态,此时可以通过左侧的设置栏设置爬升高度,上升和下降速度
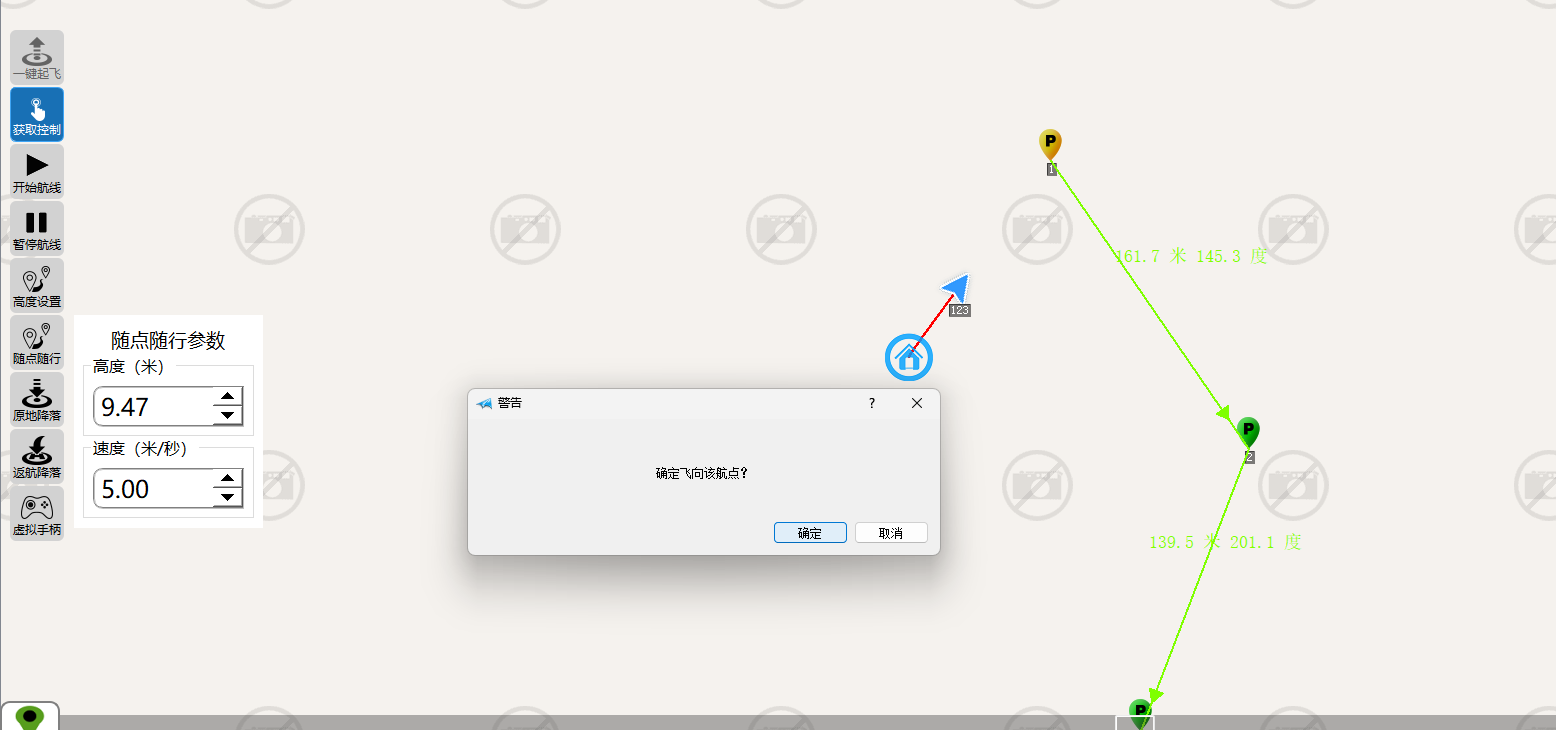
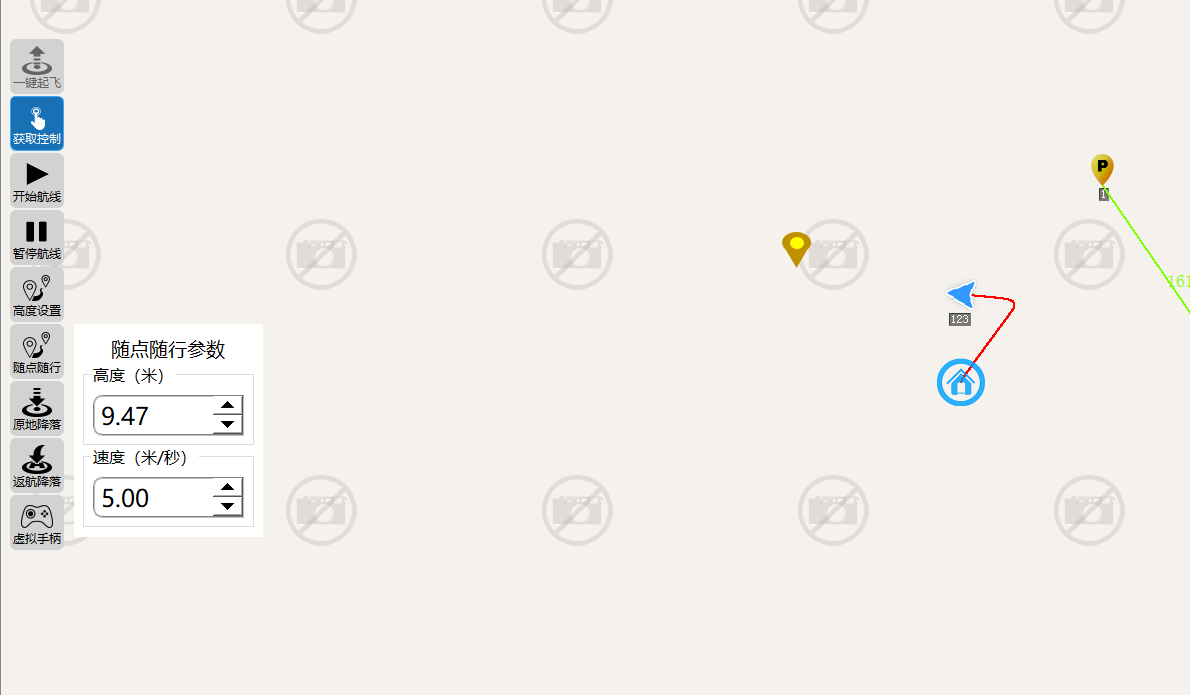
6.随点随行
点击后,鼠标点击地图的任意位置,飞行器会以设定的高度和速度飞向该位置
7.原地降落,返航降落
-
原地降落:飞机以当前位置,当前高度下降
-
返航降落:飞行器以当前高度(默认当前高度,可以通过参数设置-参数设置中修改),先飞向返航点,再执行原地降落
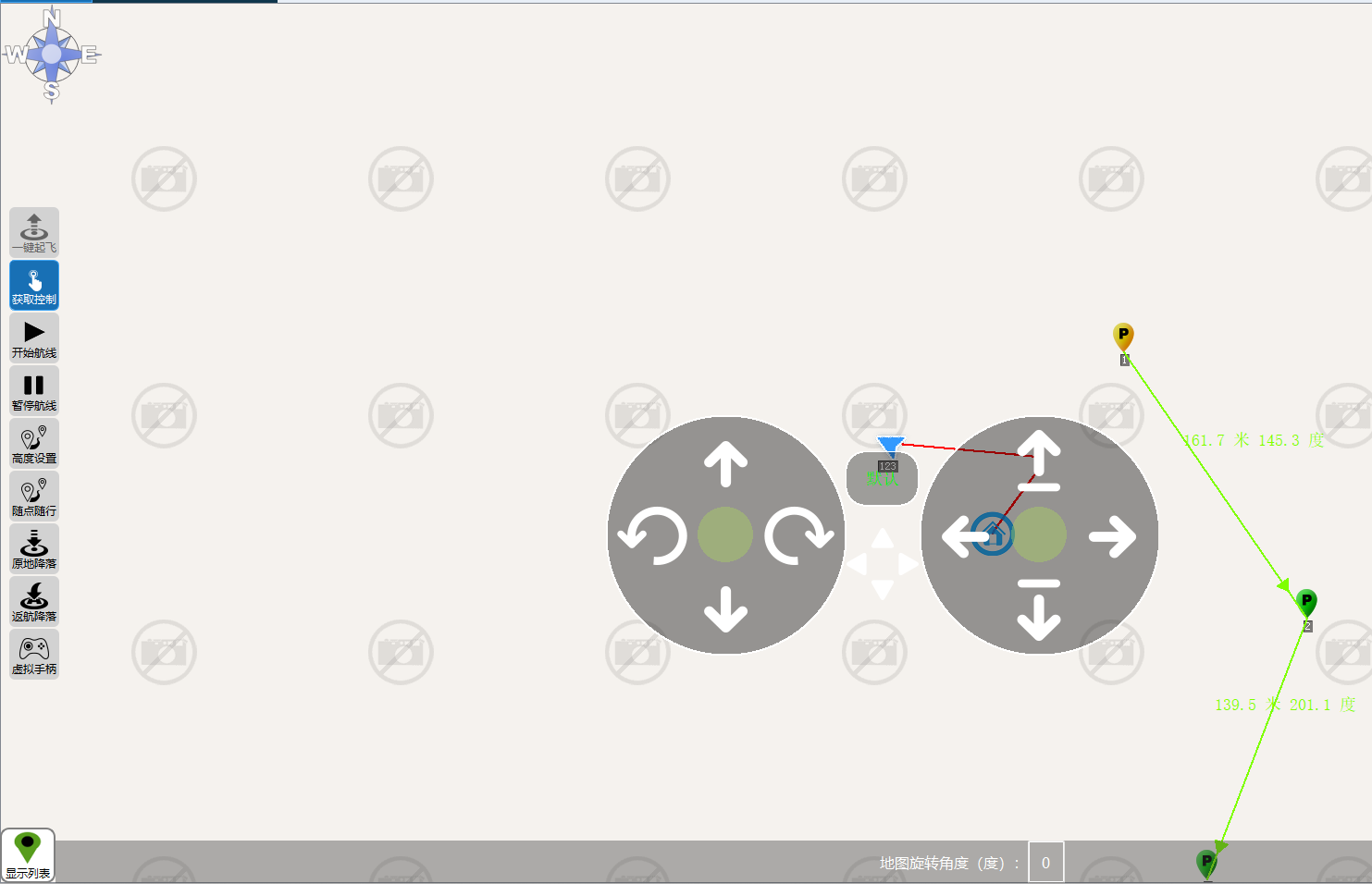
8.虚拟手柄
- 点击虚拟手柄,此时飞行器进入悬飞状态,可以通过鼠标点击屏幕上的操纵杆实时操作飞行器横滚俯仰航向以及油门
- 在点击手动控制后(自动进入悬飞模式),可以使用虚拟手柄对飞行器的横滚、俯仰、油门、航向进行控制,并且针对不同情况,可进行默认模式与微调模式的切换。微调模式会比默认模式更迟钝,主要用于定点悬停、原地降落、返航降落时微调飞行器位置,
- 虚拟手柄操作方式:点击虚拟手柄的任意按钮,该按钮会长亮,飞行器会持续执行该动作,直至重新点击该按扭,按钮不亮后,飞行器才会停止该动作。
地面站与遥控器的控制切换
- 在虚拟手柄关闭的情况下,飞行器都处于遥控器控制的状态下。
- 当虚拟手柄打开时,则为地面站控制;
- 当需要恢复成遥控器控制时,把虚拟手柄关闭或者切换到其它飞行模式即可使用遥控器直接获取控制时,请确保油门处于正确位置;
- 若通信质量较差时,可能会出现接管延时,此时有两种应对建议;作人员时刻注意飞行器状态,预测到有危险情况时,请尽量提前接管的时机;遥控器切换至高度保持后,等飞行器息停稳定后,再操控飞行器。
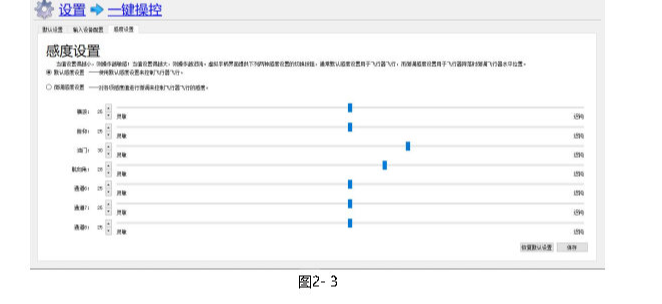
虚拟手柄的感度调整
- 感度设置界面是需要在地面站未连接任何飞控的状态下,点击参数设置-一键操控中修改
- 感度设置此设置界面为用于调整手动模式下,使用虚拟手柄进行飞行控制时的灵敏度。此界面可以调整默认感度以及微调感度的灵敏度,当飞行出现过于灵敏或迟钝时,可到此界面进行调整
- 油门的灵敏度不建议设置低于 25,否则飞行器的油门会非常灵敏
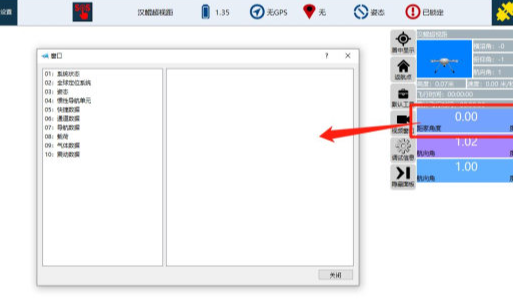
自定义信息栏介绍
点击右边蓝色的快速检查窗口中的任意一个,即会弹出项目窗口,在项目窗口中可自行选择需要监视的飞行器信息即可。例如下图选择的项目为“全球定位系统”中的“距家角度”
参数设置页面(已连接后状态)
根据许可证不同,部分功能不开放给用户使用,但此处有对应介绍

软件设置
常规设置与许可证管理设置请参考本使用教程开头的:“常规设置”,“许可证管理”的内容
任务计划:没人用,我也不会用,等学会了再补充
基本参数设置
用户参数设置
- 用户在起飞前,可以根据自己的偏好去设置这些参数的内容,非必须设置,可以保持默认即可
- 连接上地面站后,点击参数设置-参数设置
- 该功能中包括了返航高度设置,低电压设置,地面站通信(失效)保护设置,还有悬飞状态下的飞行器最大飞行速度设置
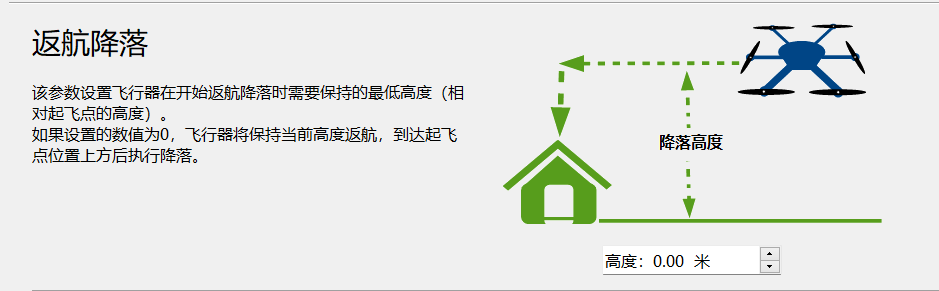
返航高度设置
- 该参数设置飞行器在开始返航降落时需要保持的最低高度(相对起飞点的高度)
- 如果设置的数值为 0,飞行器将保持当前高度返航,到达起飞点位置上方后执行降落
- 一般默认为 0,也就是以当前高度进行返航,若非要设置一个高度,建议是以当前飞行高度以上进行返航降落
下方为返航高度设置图示
电池安全
- 该参数设置飞行器的低电压数值,最低是多少伏会报警,用户可以自行设置(一般以 3.6V 单片为低电压保护阈值)
- 保护模式默认禁用,禁用的情况下,是仅有黄灯闪烁提醒,无声音
- 设置为原地降落或返航降落时,除了黄灯提醒之外,还会执行对应的动作,要注意执行动作的时候飞行器不可控,需要切换到姿态模式才可控,因此不建议设置为原地降落或返航降落
下方为低电压设置图示

地面站通信(失效)保护
- 该参数设置飞行器与地面站断开连接时,经过一定时间未恢复连接(默认 5 秒)执行的操作
- 默认为禁用,不执行任何动作
- 设置为原地降落或返航降落时,会执行对应的动作,要注意执行动作的时候飞行器不可控,需要切换到姿态模式才可控,因此不建议设置为原地降落或返航降落
下方为地面站失效保护设置图示

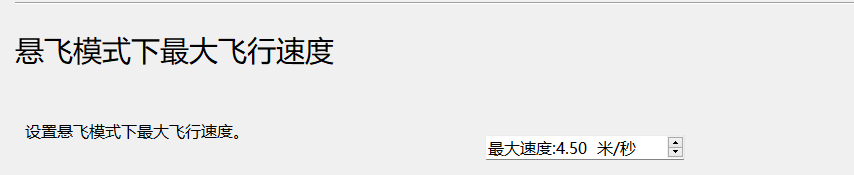
悬飞时最大速度
该参数设置悬飞时最大的飞行速度
下方为悬飞最大速度设置图示
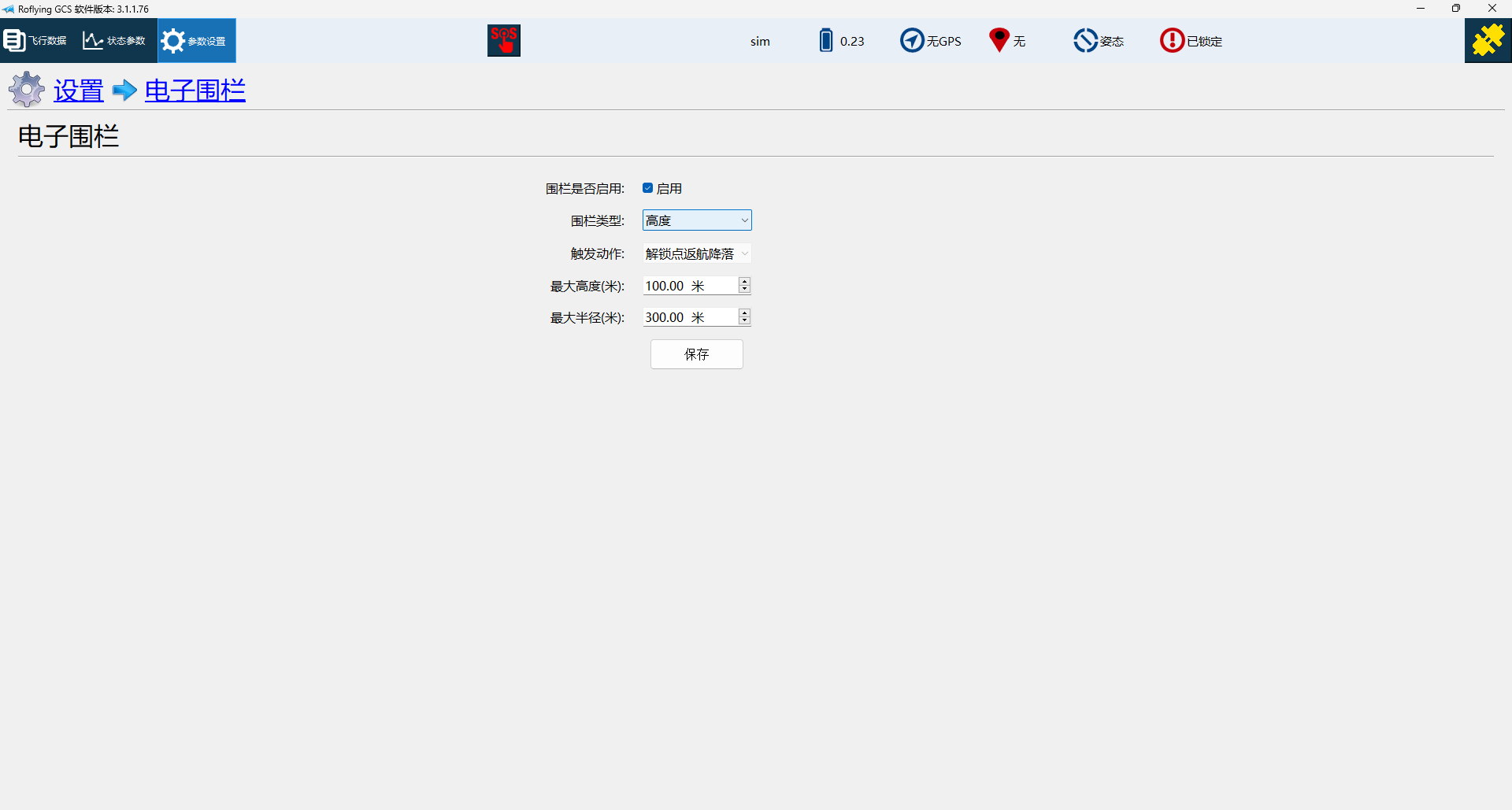
电子围栏设置
此处可以设置飞行器的安全飞行范围(也就是电子围栏),围栏类型中,可以设置高度,半径或两者结合,意味着飞行器一旦飞出半径为 300m(下方设置),高度为(100)m 的范围,立刻会触发电子围栏,此时的触发动作可以设置为返航降落或者仅显示(仅提醒)
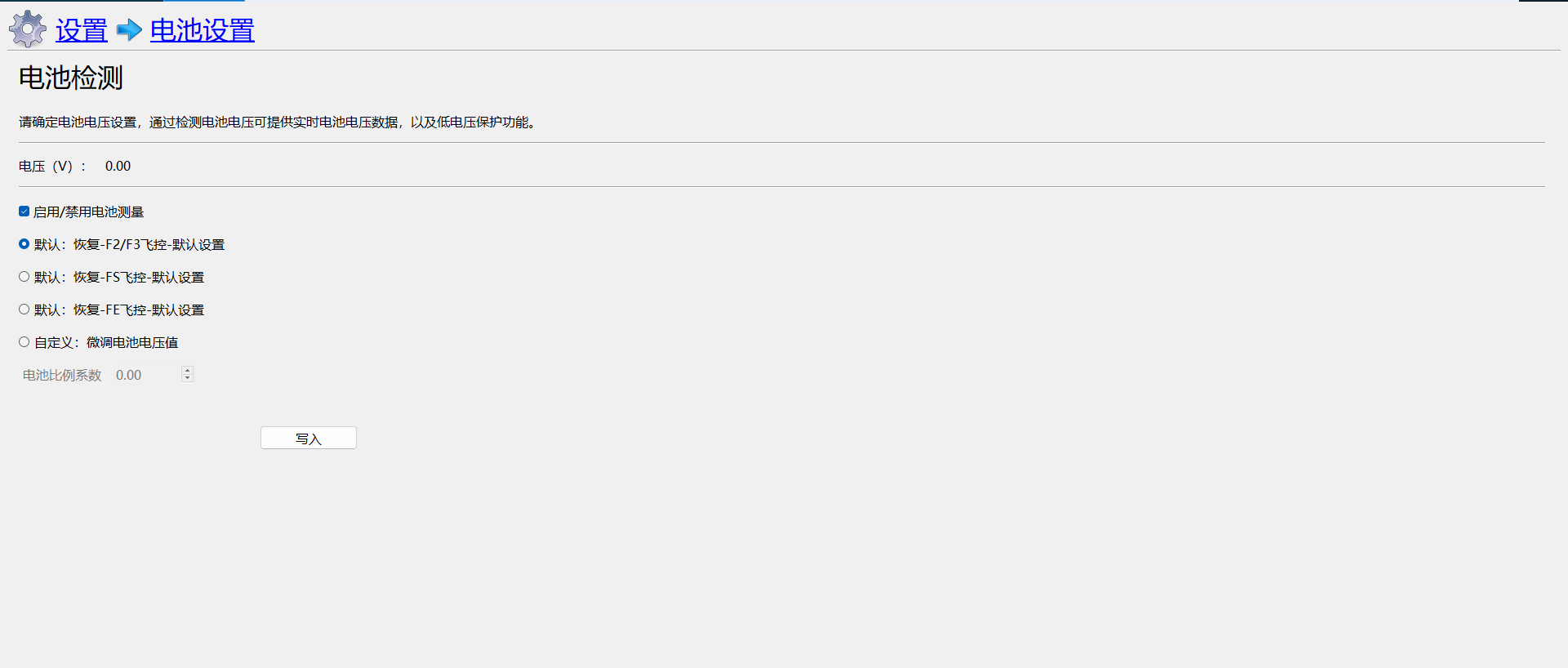
电池设置
该功能提供给客户设置电池测量的系数,一般出厂前默认即可,不需要更改。
- 值得注意的是,此处的 FS 飞控并非是 FS+飞控,而是老版本的飞控,若用户手上持有的是 FS+飞控,请选择 FE 飞控的默认设置
- 电池比例系数:使用测电笔测量电池的实际电压,对比地面站的测量电压,通过调整下方的比例系数,使测量电压数值尽量接近实际电压。
解锁/加锁动作
解锁动作更换
连上地面站后,可以在参数设置-解锁/加锁中设置自己喜欢的解锁方式
下方为解锁动作更换图示

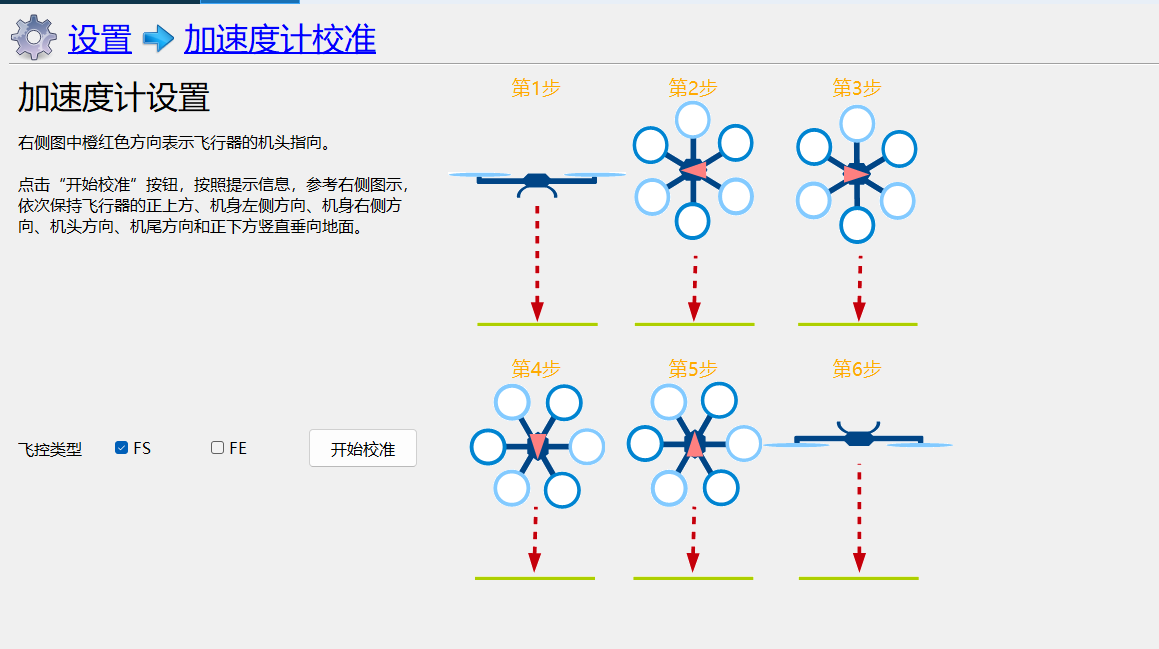
设备校准与测试
加速度计校准(不开放给用户)
根据指示,选择 FE 飞控,点击开始校准,按照提示将飞控不同面一个个放置在同一水平面后点击下一步,直到完成校准
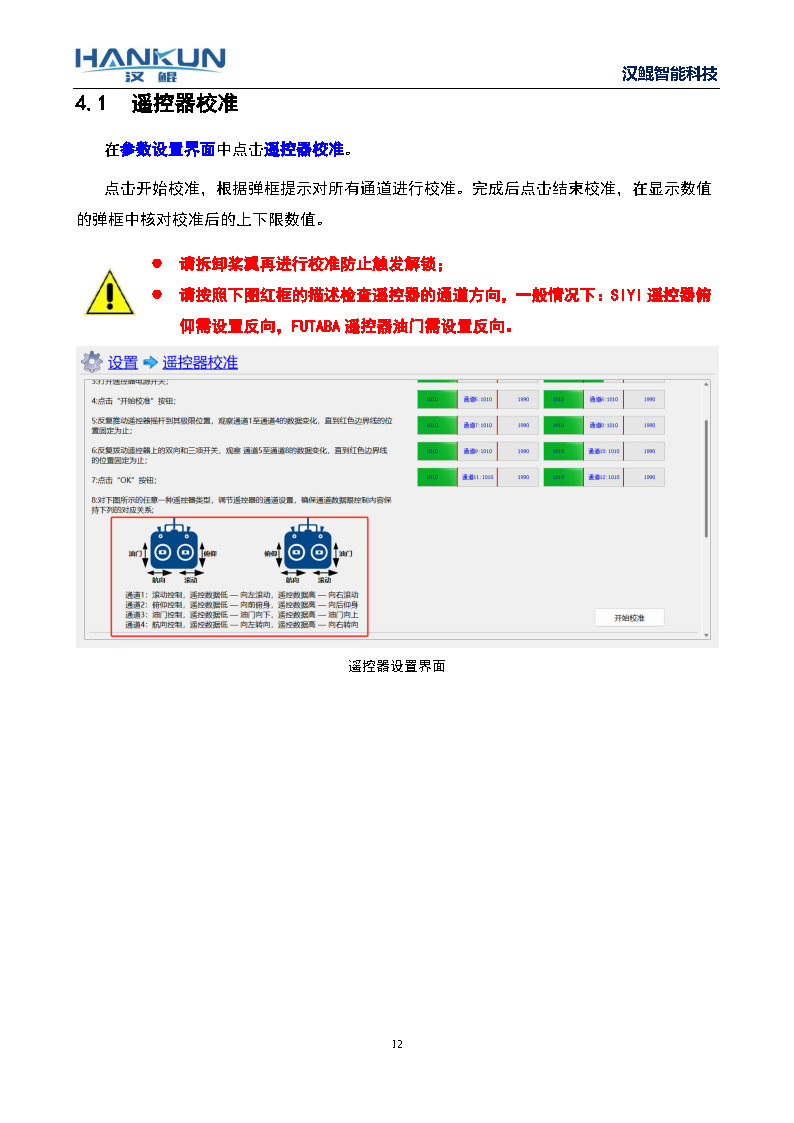
遥控器校准
- 在参数设置界面中点击遥控器校准。
- 确保遥控接收器与飞控模块正确连接并正常工作(右侧通道映射上有绿条且拨动杆时会跟随变动)
- 尽量不要安装螺旋桨(若在安装螺旋桨的情况下校准,注意不要触发解锁动作)
- 确保遥控器微调全部归零(地面站校准前最好先做一次摇杆校准)
- 点击“开始校准”按钮并确认弹窗
- 反复推动遥控器摇杆到其极限位置,观察通道 1 至通道 4 的数据变化,直到红色边界线的位置固定为处.(尽量拨到最大值和最小值,可能需要用点力气)
- 反复拨动遥控器上的双向和三项开关,观察 通道 5 至通道 8 的数据变化,直到红色边界线的位置固定为止; 确保所有杆在中位时,点击”校准结束“
- 对最终校准值进行确认,前四个通道保证最大最小值,中间值一致(误差必须在 10 以内)
- 再次拨杆,核对每个通道的正反向是否正确(遥控器校准页面下方有图示)若不正确,可在遥控器内部设置舵机反向
下方为遥控器校准图示
遥控器校准的教学视频链接:
下方为遥控器校准的视频(若客户提起遥控器校准,请发送此链接)
[遥控器校准](【试飞前检查第一步-遥控器校准】 https://www.bilibili.com/video/BV191WEetETU/?share_source=copy_web&vd_source=3294eedac1cf618d2dbda88d67edf41b)
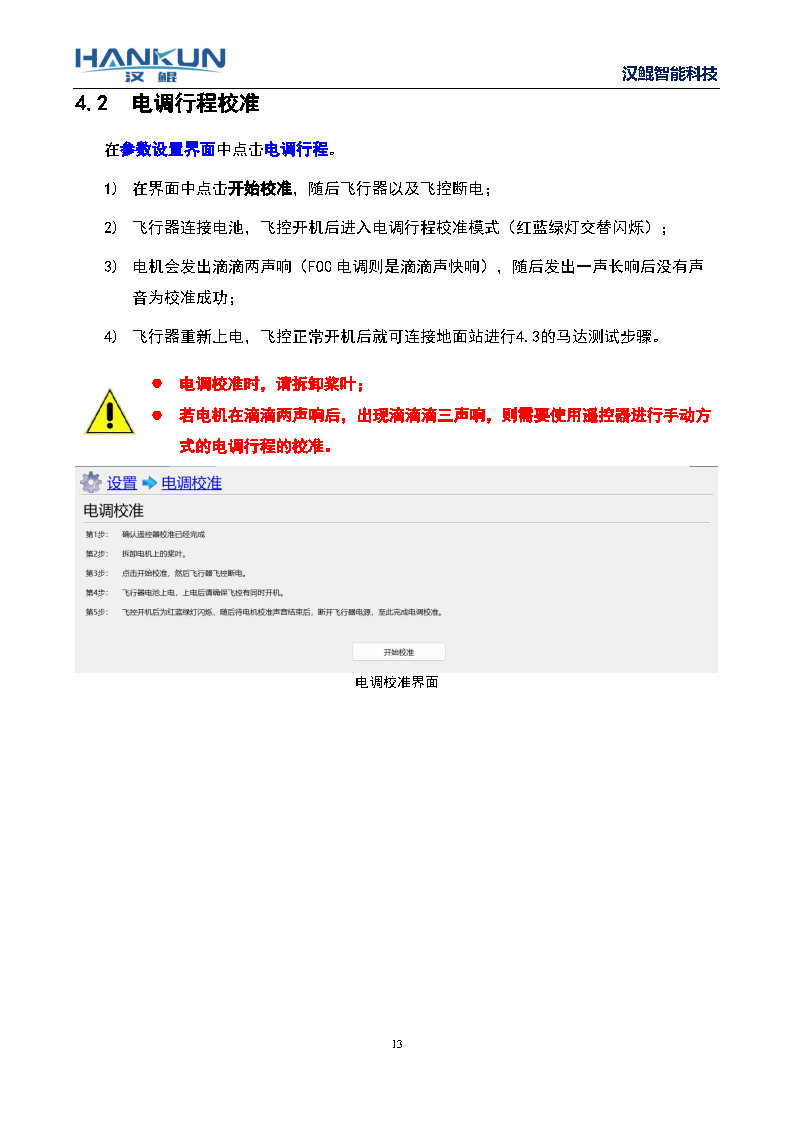
电调行程校准
- 确认遥控器校准已经完成 。
- 拆卸电机上的奖叶。
- 点击开始校准,然后飞行器飞控断电。
- 飞行器电池上电,上电后请确保飞控有同时开机。
- 飞控开机后为红蓝绿灯闪烁,随后待电机校准声音结束后,断开飞行器电源,至此完成电调校准。
下方为电调行程校准图示
电调行程校准的教学视频链接:
下方为遥控器校准的视频
[电调行程校准](【试飞前检查第二步-电调行程校准】 https://www.bilibili.com/video/BV1eWWJeaE4j/?share_source=copy_web&vd_source=3294eedac1cf618d2dbda88d67edf41b)
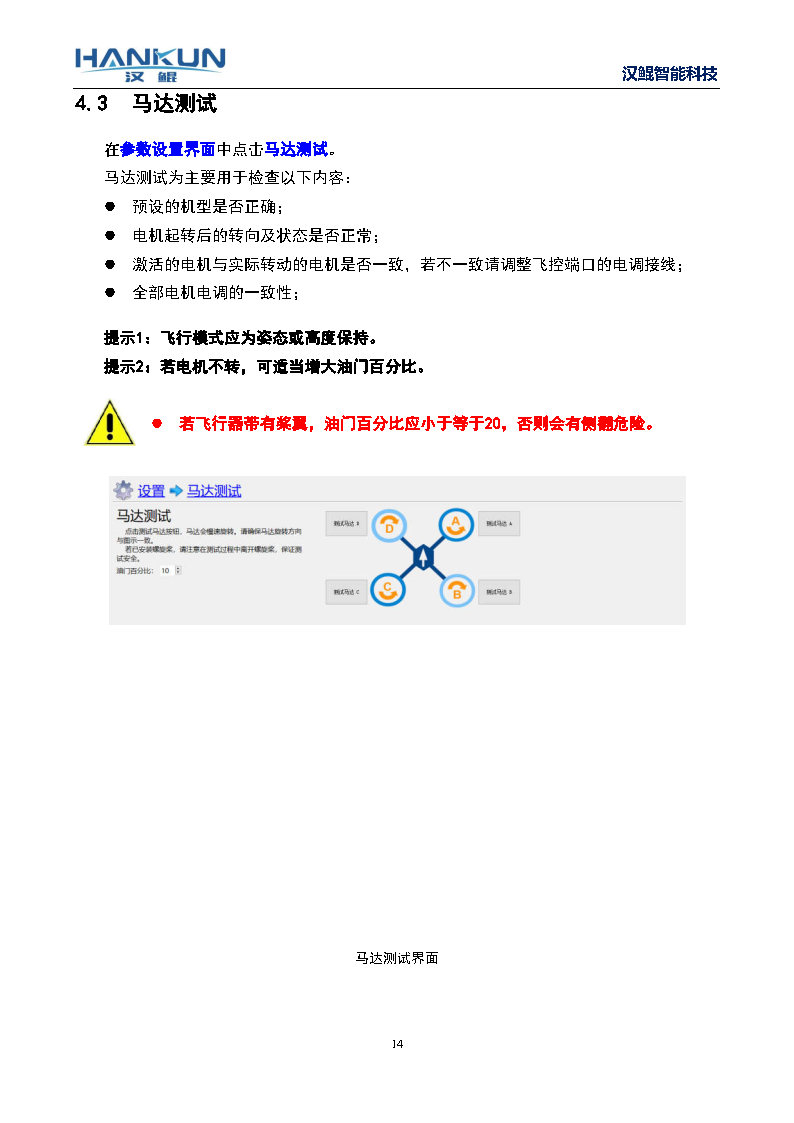
马达测试(电机测试)
- 确认所有的电机都有信号(上电没有滴滴响声)
- 飞行器切换至姿态模式,逐个测试电机转向以及位置,与左侧图示比较看是否一致
- 若均一致,则说明电机安装无误,若位置不一致,则检查是否电机电调线接错,若电机转向不一致,则调整电机与电调直接的香蕉头,任意对换一个或是查看是否是电机臂位置安装错误
- 需要注意的是若是新鲜安装飞控的飞机,最好是做两次电机测试,第一次在上桨之前,确认电机是否正常工作,转向位置是否正确,第二次是上桨后,确认桨叶转向是否与电机一致
下方为马达测试(电机测试)图示
马达(电机)测试的教学视频链接:
下方为马达测试的视频
[马达(电机)测试](【试飞前检查第三步-马达测试】 https://www.bilibili.com/video/BV1LpWJeAEMF/?share_source=copy_web&vd_source=3294eedac1cf618d2dbda88d67edf41b)
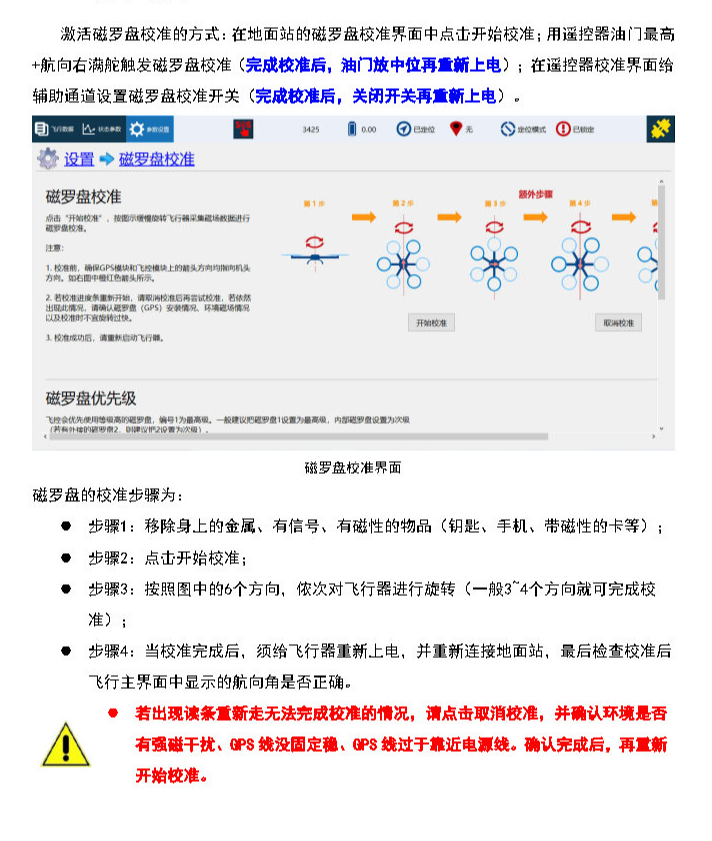
磁罗盘校准
- 首先先连上地面站,用数传或者蓝牙,不用 USB,其次必须在室外校准
- 飞行器在室外上电,等待自检通过,放下身上的金属物品,包括手机
- 点击“开始校准”,按图示缓慢旋转飞行器采集磁场数据进行磁罗盘校准。
注意:
- 校准前,确保 GPS 模块和飞控模块上的箭头方向均指向机头方向。如右图中橙红色箭头所示。
- 若校准进度条重新开始,请取消校准后再尝试校准,若依然出现此情况,请确认磁罗盘(GPS)安装情况、环境磁场情况以及校准时不宜旋转过快。
- 校准成功后,请重新启动飞行器。
下方为磁罗盘校准图示
磁罗盘校准的教学视频链接:
下方为磁罗盘校准的视频
[磁罗盘校准](【试飞前检查第四步-磁罗盘校准】 https://www.bilibili.com/video/BV1nD4y157HQ/?share_source=copy_web&vd_source=3294eedac1cf618d2dbda88d67edf41b)
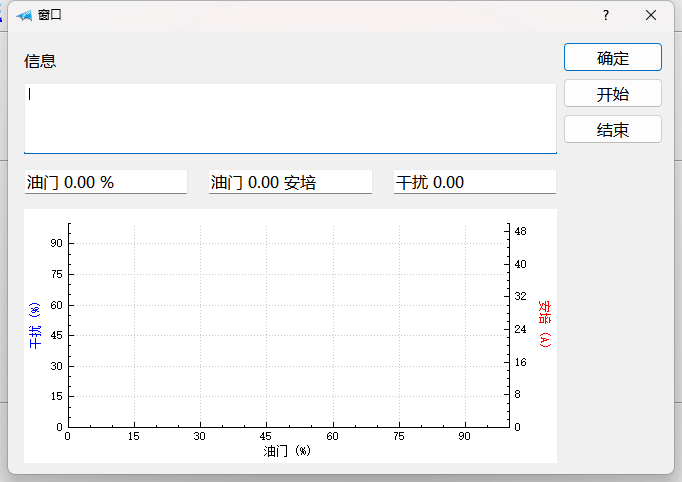
磁干扰校准:
1、请注意磁干扰校准时必须拆卸桨叶;
2、点击开始前,遥控器油门必须在最低位。
点击开始后遥控器油门由最低位推到最高位(无需解锁),电机就会起转。完成后点击结束,再点击确定。
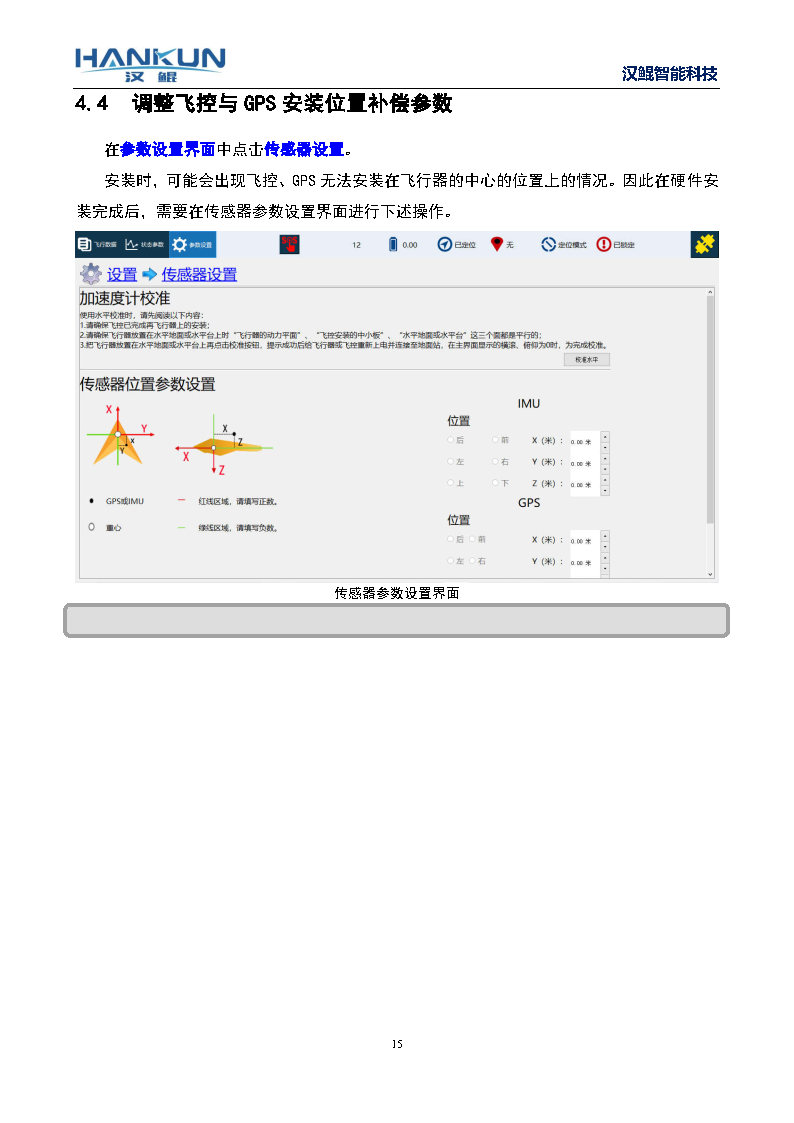
传感器参数设置
飞控的传感器设置共分为三个部分,并非初次起飞前必须要调试的选项,而是根据用户手上飞行器的机架和飞行状态不同进行的调整
水平面的校准功能
当飞行器飞行时姿态模式下有倾斜,可以尝试使用该功能
- 请确保飞控已完成再飞行器上的安装;
- 请确保飞行器放置在水平地面或水平台上时“飞行器的动力平面”、“飞控安装的中小板”、“水平地面或水平台”这三个面都是平行的;
- 把飞行器放置在水平地面或水平台上再点击校准按钮,提示成功后给飞行器或飞控重新上电并连接至地面站,在主界面显示的横滚、俯仰为 0 时,为完成校准
传感器位置参数的设置
- 当飞控安装位置以及 GPS 安装位置相距飞行器中心位置较远时,可以设置
- 通常飞控安装位置以及 GPS 安装位置没有进行设置的情况下,会出现以下情况
- 飞行器打杆后晃动较大,难以控制
- 飞行器自旋时,自旋中心是 GPS 的中心而不是飞行器中心位置
以上情况,均可以通过设置传感器位置进行优化
设置的时候要注意单位和正负
下方为传感器设置图示
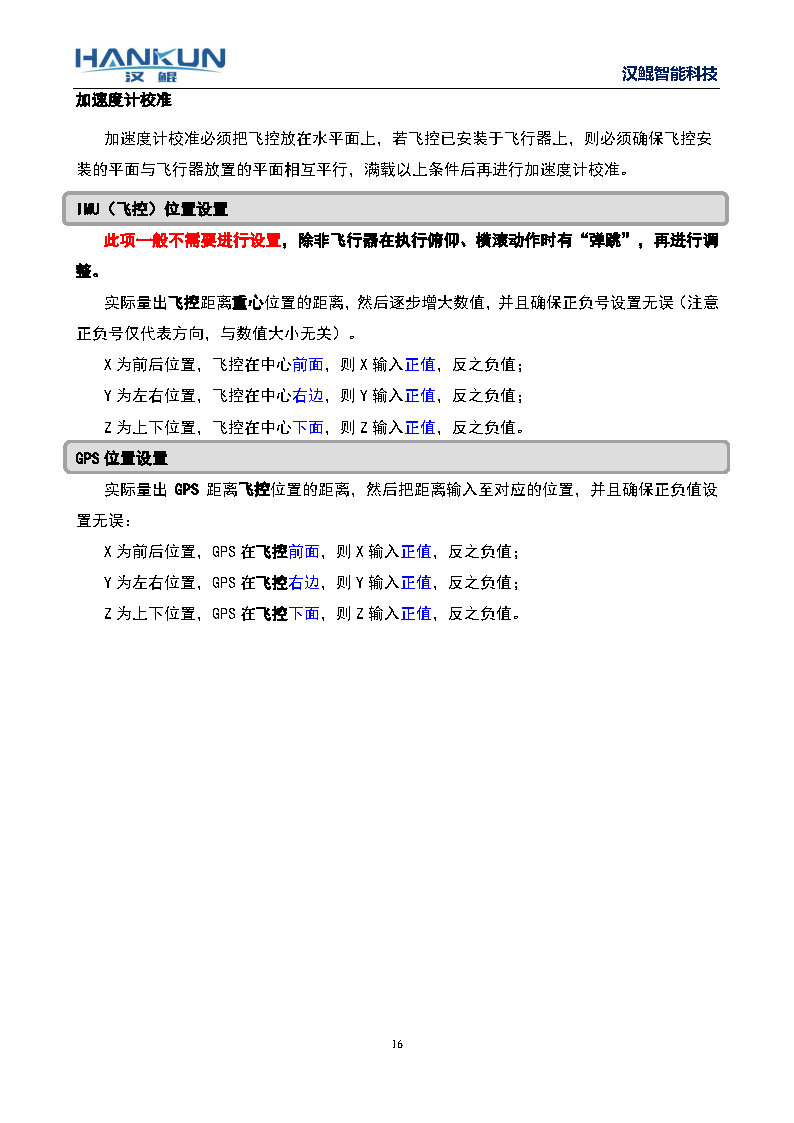
飞行器基准面调整(姿态模式偏移调整方法)
若飞行器在加速度计校准后,于姿态控制模式下,遥控器横滚、俯仰通道居中的情况下,飞行器有严重的水平漂移现象,可以在此处手动进行微调。
例如:飞行器向左边漂移,则在输入预计需要调整的角度后点击向右。每次调整角度范围在[0.11”,点击方向按键后会立即生效,建议飞行时进行调整,而日飞行模式必须为无 GPS 定位的飞行模式,例如姿态模式。
调整的具体方法
- 尽可能选择开阔的场地,GPS 定位良好,尽量选择无风的环境
- 将飞行器起飞至一个安全位置,前后左右均无建筑物阻挡,切换至 GPS 模式,等待悬停稳定
- 遥控器杆位不动,仅切换模式至姿态模式,观察飞行器的偏移情况
- 往飞行器的偏移方向的反方向调整角度,比如飞行器往左后方偏移,则向右前方调整角度,偏移量较大的情况下,可以适当增大单次调整的角度,默认为 0.1°/次,可以增加至 0.5°/次
- 反复进行调整,直到飞行器的偏移速度变慢或者偏移量明显减小
- 该功能无法将飞行器的姿态模式调整至完全不动的状态,只能尽可能优化
下方为基准面设置姿态调整图示
高级参数设置
机型设置
- 当前面步骤均完成后,理论上已经可以进行试飞,原因是飞控一般出厂前就针对客户的机型进行了参数预设,但如果有更换机型的需求,需要重新选择对应机型
- 连上地面站后,在地面站的参数设置-机型设置中选择更换,选择后要进行保存
在界面选择实际的飞行器所对应的机型然后点击保存,要注意机架类型上标的电机转向和位置,与实际的是否一致
下方为机型设置图示(机架类型设置)

用户调参设置
- 连接地面站后,进入参数设置界面-PID 调参界面。
- PID 调参界面有各项涉及飞行器控制的参数,一般飞行器出厂之前已经预设好了对应机型的参数,所以不需要用户自行调整。
- 若用户有多旋翼的 PID 调试经验,可以尝试自己动手调试。
- 若用户没有多旋翼的 PID 调试经验,出于安全考虑,建议用户与我们的工程师联系,工程师会指导进行调参。
下方为用户调参界面图示

这里也有简单的教程,有兴趣的朋友可以学习一下:
调参教程:[基础调参教程](file:///D:/work/2024HanKun/Station/oversee/2024-6-24-Aopa/2024-6-24-Aopa/files/help/PID/train.html)
PID 内部调参(不对用户开放)
具体操作非常复杂,不在地面站部分叙述
参数列表(不对用户开放)
飞控中的详细参数列表,具体参数功能不叙述
远程配置功能(不对用户开放)
用于生成配置文件,给用户调整参数
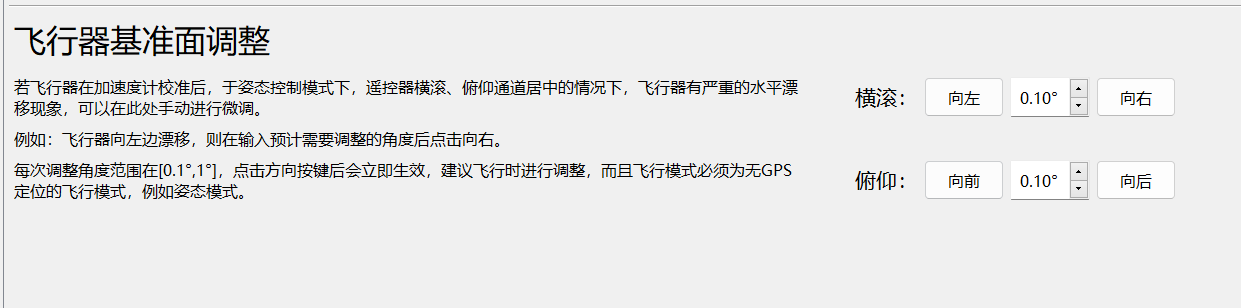
配置更新以及补丁更新
配置更新
- 连接上地面站,参数设置-更新配置
- 点击读取配置文件,上传后缀.cfg 的文件
下方配置更新图示
配置更新的教学视频连接(前半段是固件更新,后半段是配置更新):
下方是配置更新的视频
[配置更新](【飞控健康与自我检测:固件更新与配置更新】 https://www.bilibili.com/video/BV1xA411Z7vc/?share_source=copy_web&vd_source=3294eedac1cf618d2dbda88d67edf41b)
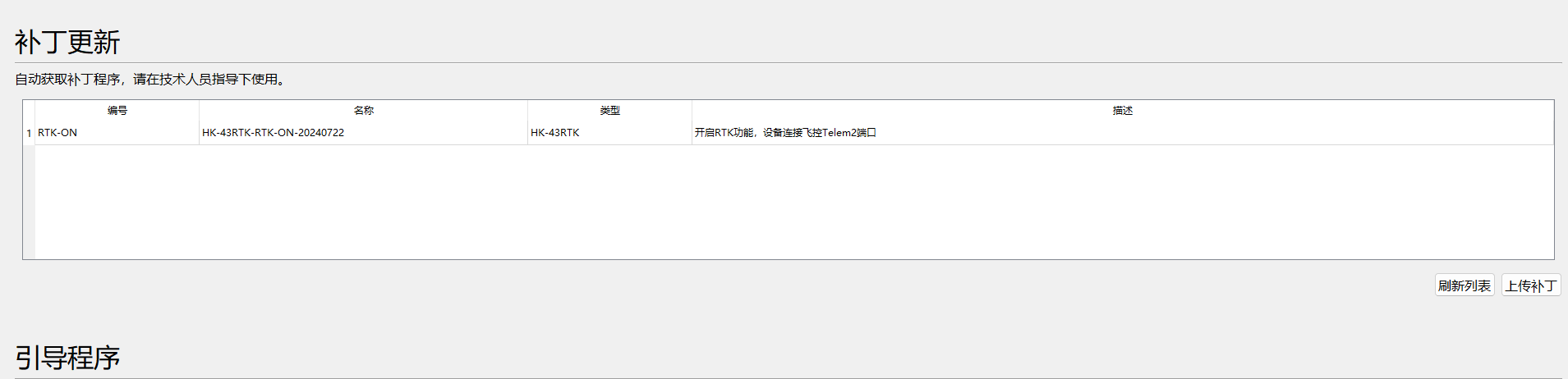
补丁更新
- 连接上地面站,电脑处于联网状态,参数设置-更新配置
- 补丁更新,点击刷新列表,会出现工程师在后台添加的补丁文件,点击上传补丁,等待上传成功
下方补丁更新图示
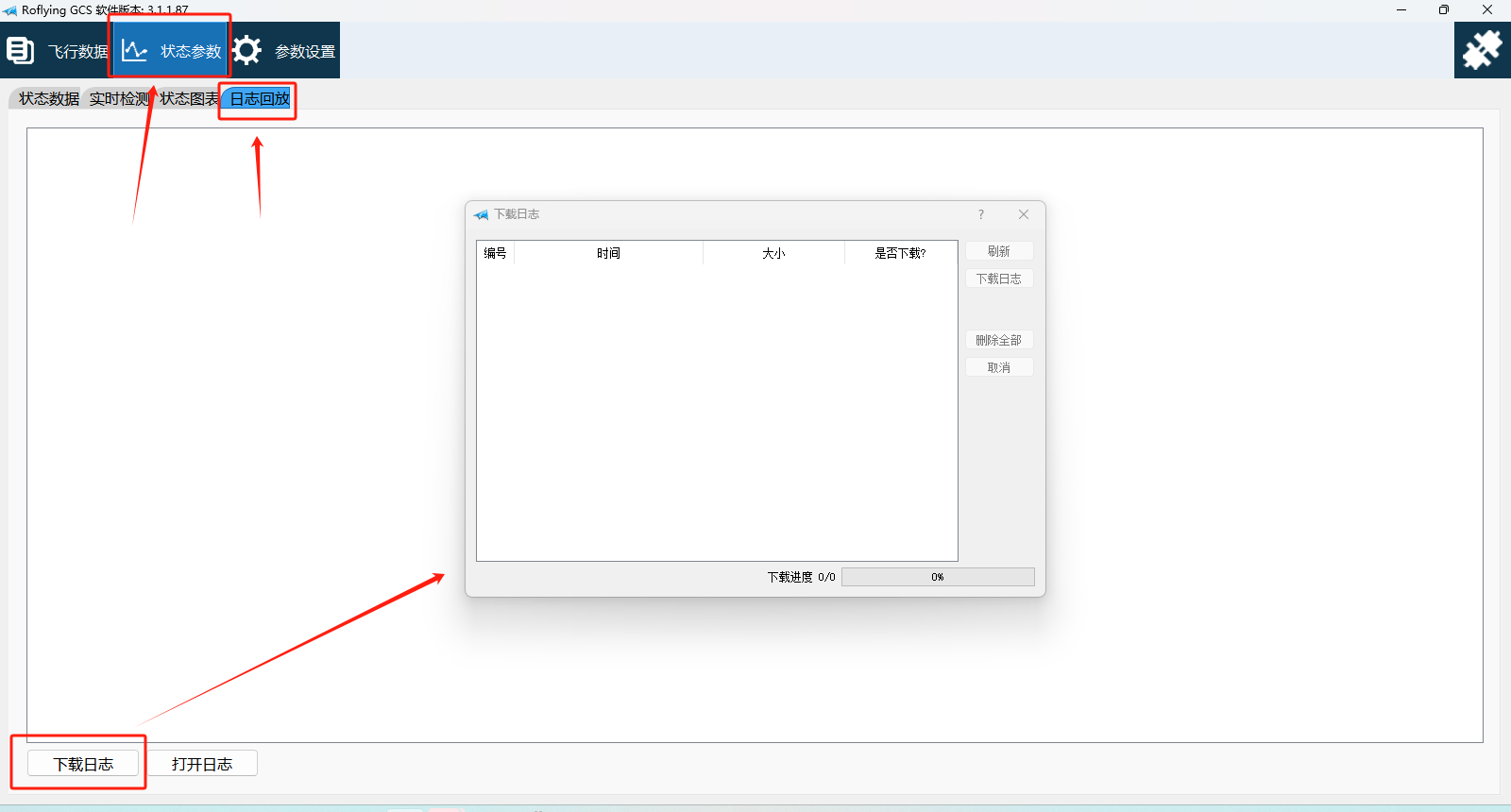
状态参数页面
日志下载页面
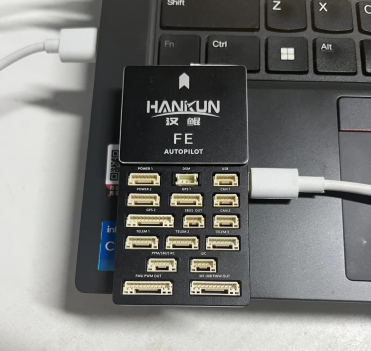
步骤一:USB直接连接飞控与电脑(请一定要有线直连,不能用数传或蓝牙的无线方式)
步骤二:新建连接或使用已有的自动连接
步骤三:使用自动连接,点击打开连接
- 如果连接不上,请确认电脑蓝牙是否已关闭,或请更新飞控驱动(下载链接)或重启地面站
步骤四:下载日志
- 按日期时间选择需要下载的日志,最新的日志一般都在列表最下面
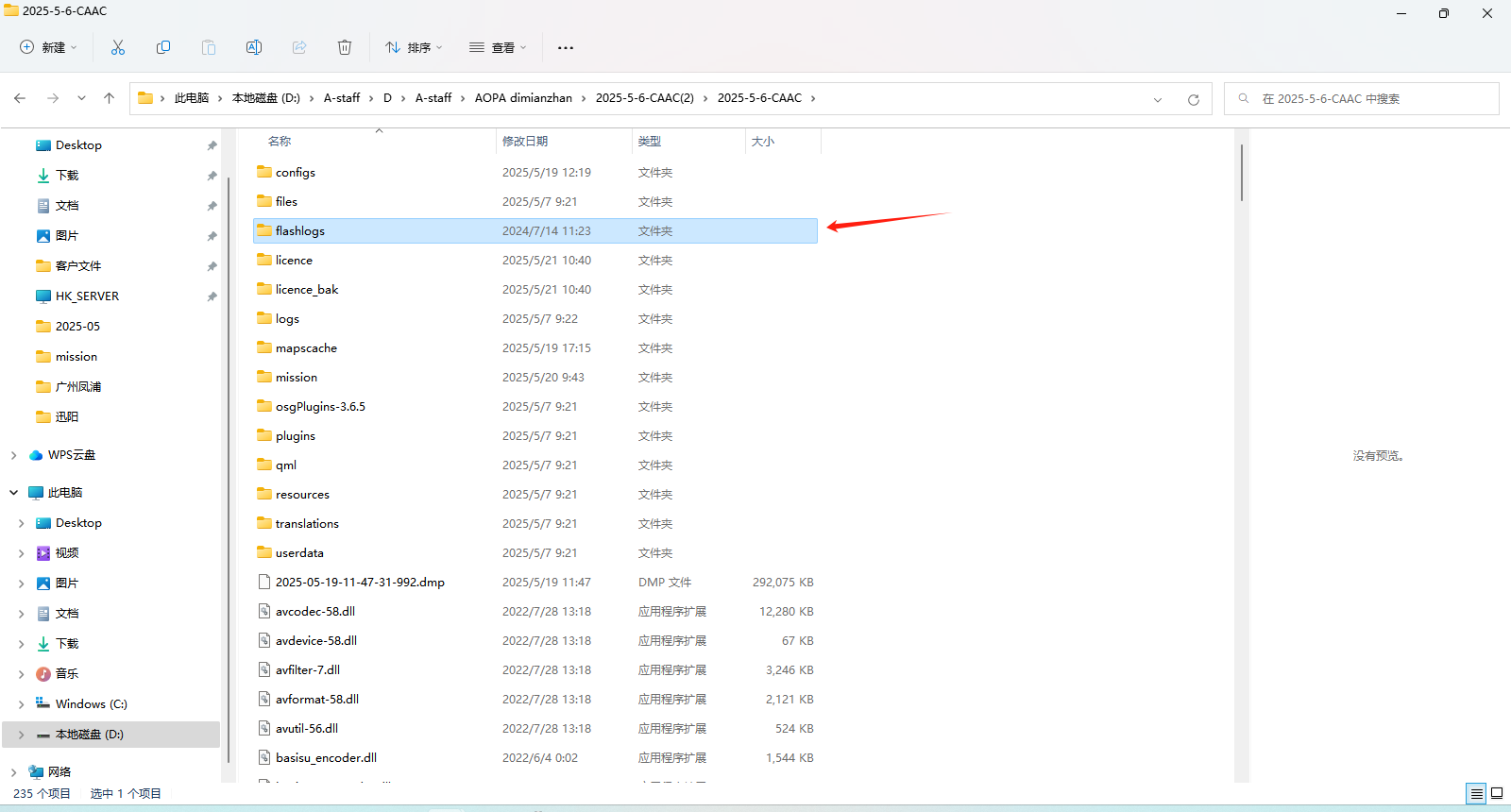
步骤五:找到下载的日志文件
- 文件都在flashlogs文件夹内
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)